― Under bad weather condition, such as rain, fog and snow.
― The window washer is being used or the windshield wipers are not used when it's raining.
― Ice, fog, snow, frost, rainfall, dirt, or foreign matter such as a plastic bag is stuck on the windshield.
― Trucks with low loading platforms and vehicles with an extremely low or high profile.
― When driving next to walls with no patterning (including fences and longitudinally striped walls).
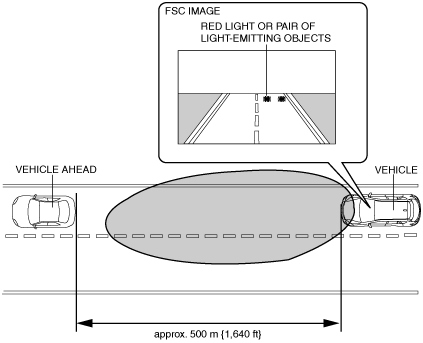
― The taillights of the vehicle ahead are turned off.
― A vehicle is outside the illumination range of the headlights.
― The vehicle is making a sharp turn, or ascending or descending a steep slope.
― Entering or exiting a tunnel.
― Heavy luggage is loaded causing the vehicle to tilt.
― Strong light is shone at the front of the vehicle (back light or high-beam light from on-coming vehicles).
― There are many light emitters on the vehicle ahead.
― When the vehicle ahead is not equipped with taillights or the taillights are turned off at nighttime.
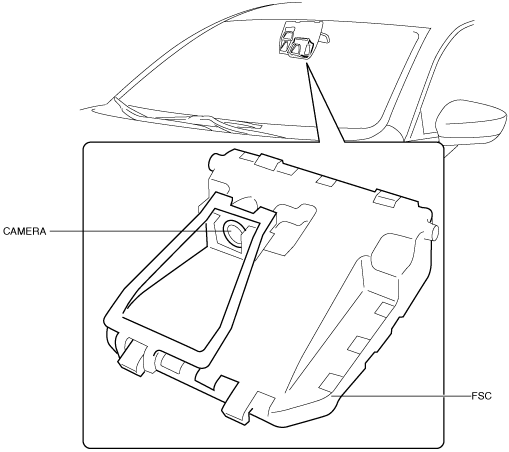
― Elongated luggage or cargo is loaded onto installed roof rails and covers the FSC.
― Exhaust gas from the vehicle in front, sand, snow, and water vapor rising from manholes and grating, and water splashed into the air.
― When towing a malfunctioning vehicle.
― The vehicle is driven with tires having significantly different wear.
― The vehicle is driven on down slopes or bumpy roads.
― There are water puddles on the road.
― The surroundings are dark such as during the night, early evening, or early morning, or in a tunnel or indoor parking lot.
― The illumination brightness of the headlights is reduced or the headlight illumination is weakened due to dirt or a deviated optical axis.
― The target object enters the blind spot of the FSC.
― A person or object bursts onto the road from the shoulder or cuts right in front of you.
― You change lanes and approach a vehicle ahead.
― When driving extremely close to the target object.
― Tire chains or a temporary spare tire is installed.
― The vehicle ahead has a special shape. For example, a vehicle towing a trailer house or a boat, or a vehicle carrier carrying a vehicle with its front pointed rearward.
 ac5wzn00000386
ac5wzn00000386