CRUISING & TRAFFIC SUPPORT (CTS)
id151000004500
Outline
• The cruising & traffic support (CTS) is a system to reduce driving fatigue during long drives on expressways and it consists of the headway control function and the steering assist function.
• When the radar unit and the forward sensing camera (FSC) detect target information while driving in constant speed control mode, they send target information to the body control module (BCM) and switch to headway control mode.
• Using the headway control function allows the driver to maintain constant-speed driving at a set vehicle speed and to maintain a constant distance from a vehicle ahead without having to depress the accelerator or brake pedal.
• If the detecting vehicle stops when the vehicle ahead stops, headway control resumes after the vehicle ahead moves again.
-
Warning
-
• Do not rely completely on the cruising & traffic support (CTS) and always drive carefully. There are limitations to the distance between the vehicles which can be controlled by the cruising & traffic support (CTS), and if the accelerator pedal or brake pedal is mistakenly operated it could result in an accident. Always keep a safe distance from the vehicle ahead by depressing the brake pedal if necessary while verifying the safety of the surrounding area.
• The cruising & traffic support (CTS) performs brake control, however, there are limitations to the deceleration, and the system may be unable to decelerate sufficiently to avoid hitting the vehicle ahead if the vehicle ahead applies the brakes suddenly or another vehicle cuts into the driving lane, which could result in an accident. Always keep a safe distance from the vehicle ahead by depressing the brake pedal if necessary while verifying the safety of the surrounding area.
• The cruising & traffic support (CTS) is not a system for the purpose of autonomous driving. In all situations, always make it your responsibility as a driver to check the vehicle's surroundings and drive the vehicle correctly.
• The cruising & traffic support (CTS) functions have limitations. Over reliance on the cruising & traffic support (CTS) and neglecting prudent steering wheel operation could cause an unexpected accident resulting in death or serious injury. Do not rely completely on the cruising & traffic support (CTS). Always stay on course using the steering wheel and drive carefully.
-
Caution
-
• If the forward sensing camera (FSC) aiming is not completed correctly, the forward sensing camera (FSC) cannot record the camera shooting angle and the cruising & traffic support (CTS) may not operate normally. When performing the following servicing, always perform the forward sensing camera (FSC) aiming. For the forward sensing camera (FSC) aiming procedure, refer to [FORWARD SENSING CAMERA (FSC) AIMING] in the workshop manual.
-
― Forward sensing camera (FSC) replacement
― Windshield replacement
• If the radar unit aiming is not completed correctly, the radar unit cannot record angle corrections and the cruising & traffic support (CTS) may not operate normally. When performing the following servicing, always perform the radar unit aiming. For the radar unit aiming procedure, refer to [RADAR UNIT AIMING] in the workshop manual.
-
― Radar unit replacement
― Front bumper replacement
― Mascot replacement
-
Note
-
• The headway control does not detect the following objects as target objects.
-
― On-coming vehicles
-
― Pedestrians
-
― Stationary objects (such as stopped vehicles, obstructions)
• If a vehicle ahead is driving extremely slowly, it could not be detected correctly.
• If there are road structures or obstructions (such as a monorail) at a low position from the ground ahead, the system could operate. Therefore, do not use the CTS.
• Do not use the CTS under conditions in which proximity warnings activate frequently.
• When acceleration is required such as when making a lane change, or when suddenly approaching a vehicle such as the vehicle ahead suddenly applies the brakes, accelerate using the accelerator pedal or decelerate using the brake pedal according to the conditions.
• When deceleration is required, reduce the set vehicle speed or depress the brake pedal.
• While the brakes are operating under CTS control, an operation sound may be heard, however it does not indicate a malfunction.
• While the brakes are operating under CTS control, the brake lights turn on, however they may not turn on while traveling at a set speed on a downslope or following a vehicle ahead at a constant speed.
• Under the following conditions, the CTS may not operate normally if it cannot detect white lines (yellow lines) of the vehicle lane or a vehicle ahead.
-
― Forward sensing camera (FSC) cannot recognize white lines (yellow lines) and vehicles ahead due to dirty or fogged windshield
-
― Poor white line (yellow line) visibility due to fading or soiling
-
― Poor white line (yellow line) or vehicle ahead visibility due to weather (such as rain, fog, or snow)
-
― Vehicle is driven on temporary lane or section with closed lane resulting from construction (there might be multiple white lines (yellow lines) or they are interrupted)
-
― Indiscernible white lines (yellow lines), road maintenance markings, shadows, residual snow, or water-filled road ruts are visible.
-
― Road surface is wet and shiny or there are water puddles after rainfall
-
― Vehicle is tilted by heavy cargo in luggage compartment or rear seat
-
― Poor white line (yellow line) visibility due to vehicle ahead traveling near white lines (yellow lines)
-
― Windshield is dirty or fogged
-
― Vehicle is driven through intersection, junction, or on forked road
-
― White lines (yellow lines) of vehicle lane cannot be detected due to road conditions or weather
-
― Surrounding brightness suddenly changes such as when entering or exiting tunnel
-
― At night, headlight lens is dirty and illumination is weak or its optical axis is deviated
-
― Road surface is shiny due to backlight or after rainfall
-
― Shadow of guardrail parallel to white lines (yellow lines) is cast on road
-
― Width of driving lane lines is narrow or wide
-
― Vehicle is driven on winding road
-
― Vehicle is shaken after hitting road bump
-
― There are various road markings or lane markings of various shapes near intersection
-
― There is dirt in front of the camera or something obstructing the view is attached
-
― Smoke from vehicle exhaust, sand, snow, steam rising from manholes or grating, or water spray is dispersed into air
-
― Dim light such as at evening and early morning
-
― Vehicle ahead has taillights with special shape
-
― Vehicle ahead is traveling largely deviated from center of detecting vehicle
-
― Vehicle ahead is traveling erratically
-
― Sharp curves
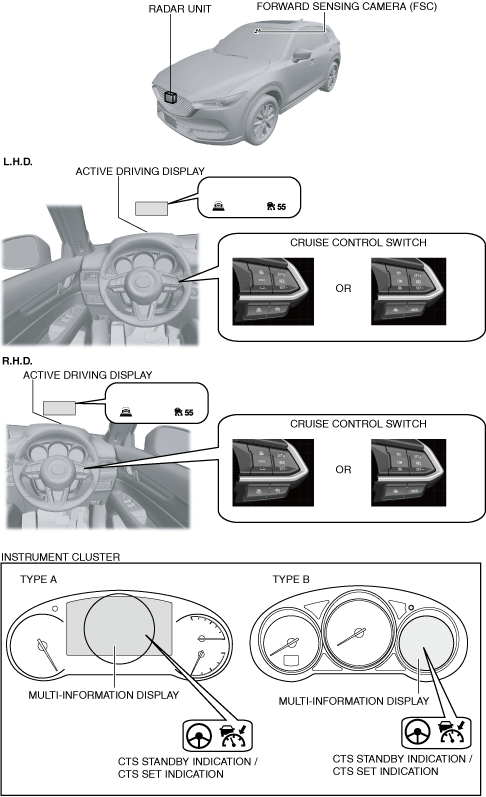
Structural view
Function
• The cruising & traffic support (CTS) has the following functions.
-
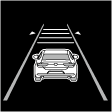
― Headway control function: When a vehicle ahead is detected while the vehicle is traveling in constant speed control mode, headway control with the vehicle ahead is performed while maintaining the set vehicle speed and the set distance between the vehicles by the driver. In addition, the detecting vehicle stops when the vehicle ahead stops, and headway control mode/constant speed control mode is resumed by operating the RES switch/accelerator pedal after the vehicle ahead moves again.
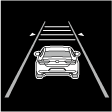
― Steering assist function: When vehicle lane lines are detected while driving, the function assists the driver’s steering wheel operation to keep the vehicle within the driving lane. When vehicle lane lines are not being detected, the function assists the driver’s steering operation to follow the trajectory of the vehicle ahead.
― Hands off steering wheel detection function: If the driver takes his/her hands off the steering wheel while driving, a warning is displayed on the multi-information display and the active driving display to warn the driver. If driver’s hands remain off the steering wheel, the system turns off.
― Stop hold function : If the vehicle ahead stops while following the vehicle ahead, the function stops the detecting vehicle at the previously set distance between vehicles and maintains a stopped condition.
Status transition
-
• Cruising & traffic support (CTS) switch operation (standby status)
When the cruising & traffic support (CTS) switch of the cruise control switch is pressed, the cruising & traffic support (CTS) standby indication (white) and the Mazda radar cruise control (MRCC) standby indication (white) on the multi-information display and the active driving display turn on.
-
Note
-
• The CTS operates when the cruising & traffic support (CTS) switch is pressed while the Mazda Radar Cruise Control with Stop & Go function (MRCC with Stop & Go function) is operating.
• SET+/Set- switch operation (constant speed control)
Constant speed control begins when the desired vehicle speed is adjusted using the accelerator pedal and the SET+ or SET- switch of the cruise control switch is pressed. The set vehicle speed is displayed on the multi-information display and the active driving display. At the same time, the indication changes from the Mazda radar cruise control (MRCC) standby indication (white) to the set indication (green).
• Vehicle ahead detection (headway control)
Headway control begin when the radar unit and the forward sensing camera (FSC) detect a vehicle ahead while traveling at a constant speed. At the same time, the vehicle ahead indication is displayed on the multi-information display and the active driving display.
• Driving lane trace
When the forward sensing camera (FSC) detects the driving lane and the operation conditions are met, the indication changes from the cruising & traffic support (CTS) standby indication (white) to the set indication (green), the vehicle lane lines (white) are displayed on the multi-information display, and the system assists the driver’s steering wheel operation to remain the vehicle near the center of the driving lane.
• Vehicle ahead trajectory tracking (headway control)
If the driving lane is not detected, the trajectory of the vehicle ahead is tracked and the indication changes from the cruising & traffic support (CTS) standby indication (white) to the set indication (green).
• Vehicle ahead not detected (constant speed control)
When the vehicle ahead no longer appears, the vehicle ahead indication on the multi-information display and the active driving display turns off and the system switches to constant speed control.
• Cruising & traffic support (CTS) switch operation (operation stop)
When the CTS switch is pressed while the cruising & traffic support (CTS) is operating, the CTS operation stops and the cruising & traffic support (CTS) standby indication (white) or the set indication (green) turns off.
Distance between vehicles setting function
-
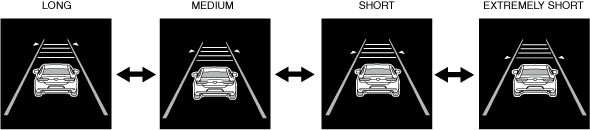
• Using the DISTANCE switch on the cruise control switch, the distance between vehicles during headway control mode can be controlled at 4 levels, including longÆmediumÆshortÆextremely short. (Initial setting is LONG)
-
Caution
-
• The distances between vehicles indicated below are average values during travel on flat roads and differ depending on the driving and road conditions.
Distance between vehicles table (reference)
|
Set distance between vehicles
|
Detecting vehicle speed
|
|
0 km/h
{0 mph}
|
10 km/h
{6.2 mph}
|
20 km/h
{12 mph}
|
30 km/h
{19 mph}
|
40 km/h
{25 mph}
|
50 km/h
{31 mph}
|
60 km/h
{37 mph}
|
70 km/h
{43 mph}
|
80 km/h
{50 mph}
|
90 km/h
{56 mph}
|
100 km/h
{62 mph}
|
110 km/h
{68 mph}
|
|
Long
|
4 m
{13 ft}
|
10 m
{32 ft}
|
17 m
{56 ft}
|
23 m
{75 ft}
|
29 m
{95 ft}
|
36 m
{118 ft}
|
42 m
{138 ft}
|
48 m
{157 ft}
|
55 m
{180 ft}
|
61 m
{200 ft}
|
67 m
{220 ft}
|
74 m
{243 ft}
|
|
Medium
|
4 m
{13 ft}
|
10 m
{32 ft}
|
15 m
{49 ft}
|
19 m
{62 ft}
|
24 m
{79 ft}
|
29 m
{95 ft}
|
34 m
{112 ft}
|
39 m
{128 ft}
|
44 m
{144 ft}
|
49 m
{161 ft}
|
53 m
{174 ft}
|
58 m
{190 ft}
|
|
Short
|
4 m
{13 ft}
|
10 m
{32 ft}
|
13 m
{43 ft}
|
16 m
{52 ft}
|
19 m
{62 ft}
|
22 m
{72 ft}
|
25 m
{82 ft}
|
29 m
{95 ft}
|
32 m
{105 ft}
|
36 m
{118 ft}
|
40 m
{131 ft}
|
43 m
{141 ft}
|
|
Extremely short
|
4 m
{13 ft}
|
10 m
{32 ft}
|
12 m
{39 ft}
|
13 m
{43 ft}
|
15 m
{49 ft}
|
17 m
{56 ft}
|
20 m
{66 ft}
|
22 m
{72 ft}
|
25 m
{82 ft}
|
27 m
{89 ft}
|
30 m
{98 ft}
|
32 m
{105 ft}
|
|
Set distance between vehicles
|
Detecting vehicle speed
|
|
120 km/h
{75 mph}
|
130 km/h
{81 mph}
|
140 km/h
{87 mph}
|
150 km/h
{93 mph}
|
160 km/h
{99 mph}
|
170 km/h
{106 mph}
|
180 km/h
{112 mph}
|
190 km/h
{118 mph}
|
200 km/h
{124 mph}
|
|
Long
|
80 m
{262 ft}
|
86 m
{282 ft}
|
93 m
{305 ft}
|
99 m
{324 ft}
|
105 m
{344 ft}
|
105 m
{344 ft}
|
105 m
{344 ft}
|
105 m
{344 ft}
|
105 m
{344 ft}
|
|
Medium
|
63 m
{207 ft}
|
68 m
{223 ft}
|
73 m
{240 ft}
|
78 m
{255 ft}
|
83 m
{272 ft}
|
88 m
{288 ft}
|
93 m
{305 ft}
|
98 m
{321 ft}
|
103 m
{337 ft}
|
|
Short
|
47 m
{154 ft}
|
50 m
{164 ft}
|
54 m
{177 ft}
|
57 m
{187 ft}
|
61 m
{200 ft}
|
64 m
{210 ft}
|
68 m
{223 ft}
|
72 m
{236 ft}
|
75 m
{246 ft}
|
|
Extremely short
|
35 m
{115 ft}
|
38 m
{125 ft}
|
40 m
{131 ft}
|
43 m
{141 ft}
|
45 m
{147 ft}
|
48 m
{157 ft}
|
51 m
{167 ft}
|
53 m
{173 ft}
|
56 m
{183 ft}
|
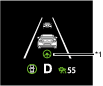
System conditions display
• The forward sensing camera (FSC) displays the system conditions on the active driving display, multi-information display, and the center display.
|
Condition
|
CTS standby indication
|
CTS set indication
|
i-ACTIVSENSE warning indication
|
Multi-information display indication (Instrument cluster)
|
Active driving display indication
|
|
CTS system is OFF
|
Off
|
Off
|
Off
|
No display
|
No display
|
|
CTS system is ON
|
CTS system is on standby
|
On
|
Off
|
Off
|
 |
 |
|
Vehicle ahead is detected
|
Off
|
On
|
Off
|
 |
 |
|
Distance between vehicles
|
Long
|
Off
|
On
|
Off
|
 |
 |
|
Medium
|
Off
|
On
|
Off
|
 |
 |
|
Short
|
Off
|
On
|
Off
|
 |
 |
|
Extremely short
|
Off
|
On
|
Off
|
 |
 |
|
Driver takes his or her handsoff steering wheel
|
Off
|
On
|
Off
|
 |
 |
|
CTS system is ON
|
Accelerator pedal is depressed
|
On
|
Off
|
Off
|
No display
|
No display
|
|
Deceleration exceeding system limits required
|
Off
|
On
|
Off
|
 |
No display
|
|
CTS system temporarily off due to related unit condition
|
Off
|
Off
|
On
|
 |
No display
|
|
CTS system off without driver’s intention
|
Off
|
Off
|
Off
|
 |
 |
|
Malfunction occurred in CTS system
|
Off
|
Off
|
On
|
 |
No display
|
*1 :When the steering assist function operates, the steering assist operation display on the display changes from white to green.
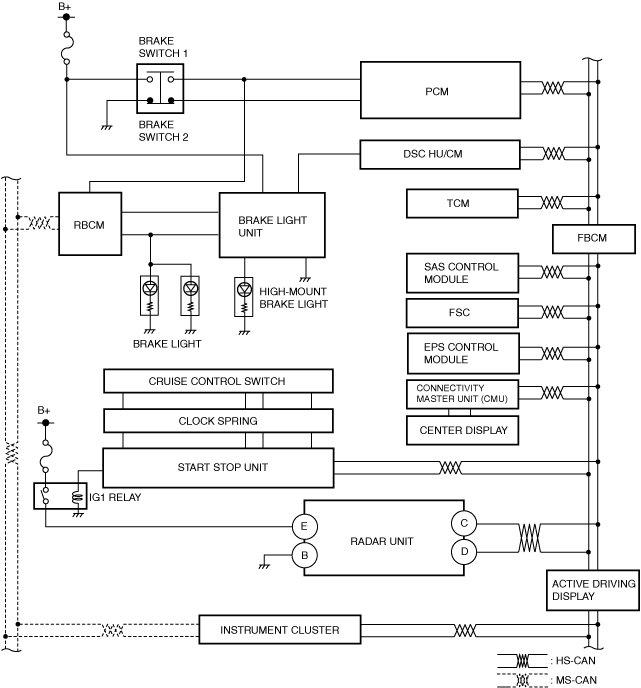
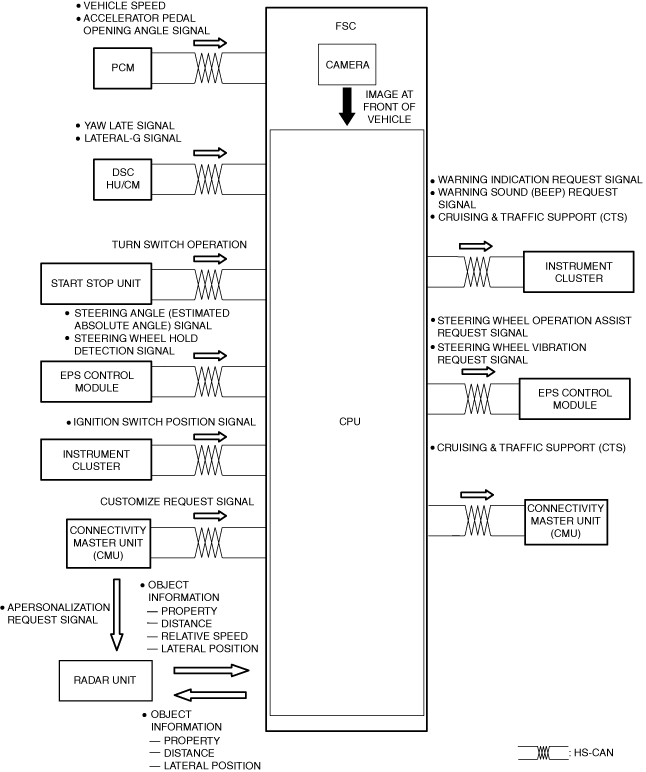
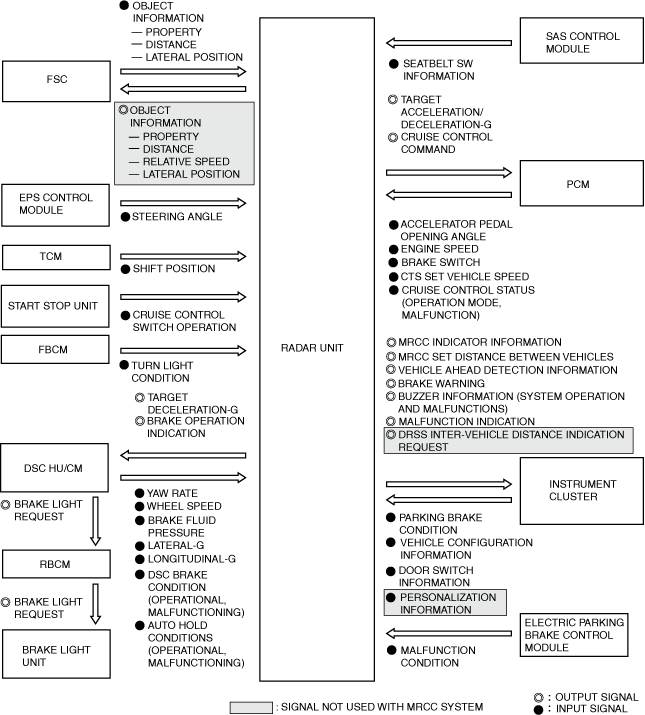
System wiring diagram
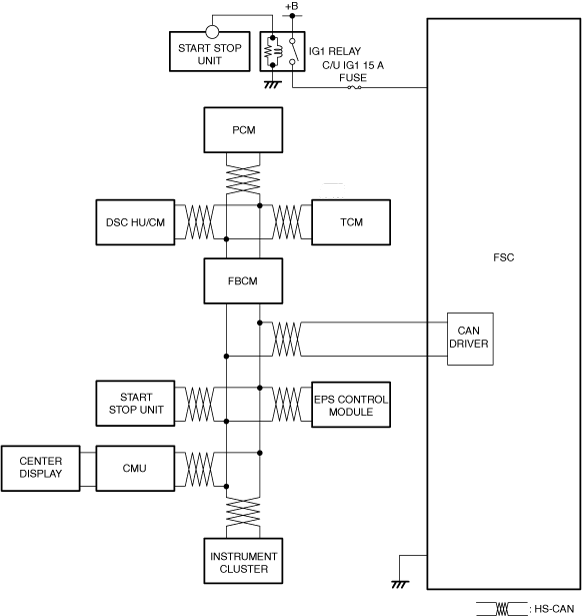
Block diagram
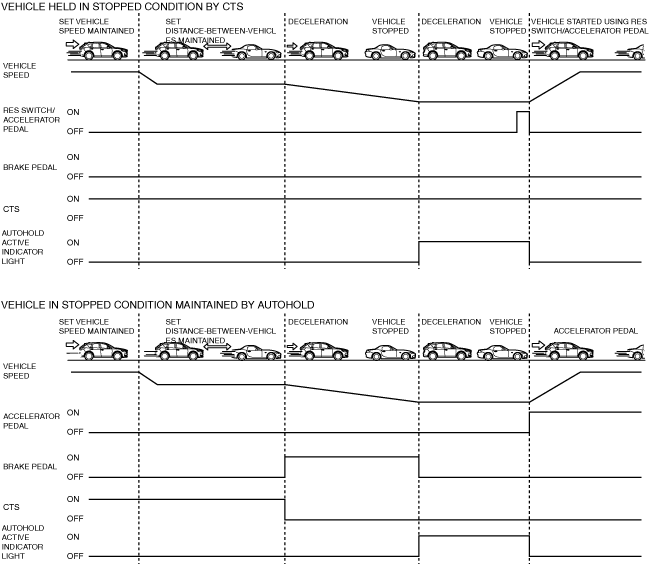
Operation
• For details on autohold, refer to [AUTOHOLD]. (See
AUTOHOLD.)
• When all of the following conditions are met, the Cruising & Traffic Support (CTS) operates.
Operation condition
-
― Vehicle speed is within range of approx. 0 km/h {0 mph} to 145 km/h {90mph}
― Selector lever is in D position
-
Note
-
• Under the following conditions, the CTS cannot be used when the vehicle speed is less than approx. 30 km/h {20 mph}. In addition, a message, “Mazda Radar Cruise Control Disabled Under 30 km/h (20 mph)“ is displayed in the multi-information display.
-
― The forward sensing camera (FSC) cannot detect target objects (windshield is damaged or dirty).
― The CTS may not launch directly after the main power ON (READY on).
― The Cruising & Traffic Support (CTS) is operation
― The headway control function of the Mazda Radar Cruise Control (MRCC) or Mazda Radar Cruise Control with Stop & Go function (MRCC with Stop & Go function) is set to operable (if it was set to inoperable, set it to operable using the personalization function)
― The brake pedal is not depressed
― The parking brake is released (Electric Parking Brake (EPB) indicator light is turned off)
― All the doors are closed
― The driver’s seat belt is fastened
-
Note
-
• The steering assist function operates under the following conditions.
-
― Vehicle speed is less than approx. 55 km/h {34 mph}.
― White (yellow) lane lines on both sides are detected and you are driving near the center of the lane, or your vehicle detects a vehicle ahead.
― The steering wheel is not turned sharply.
― The turn signal lever is not operated.
― The headway control function is operating.
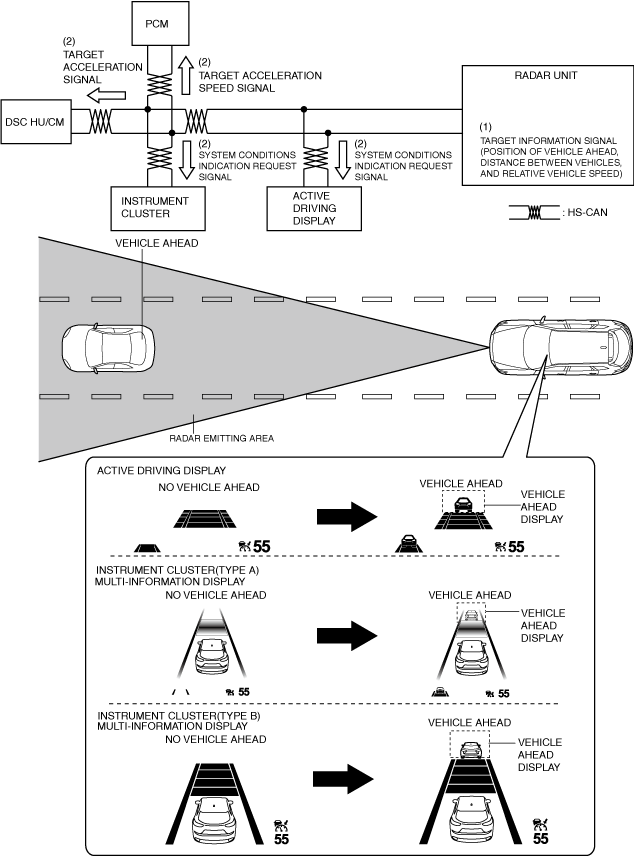
Headway control function
-
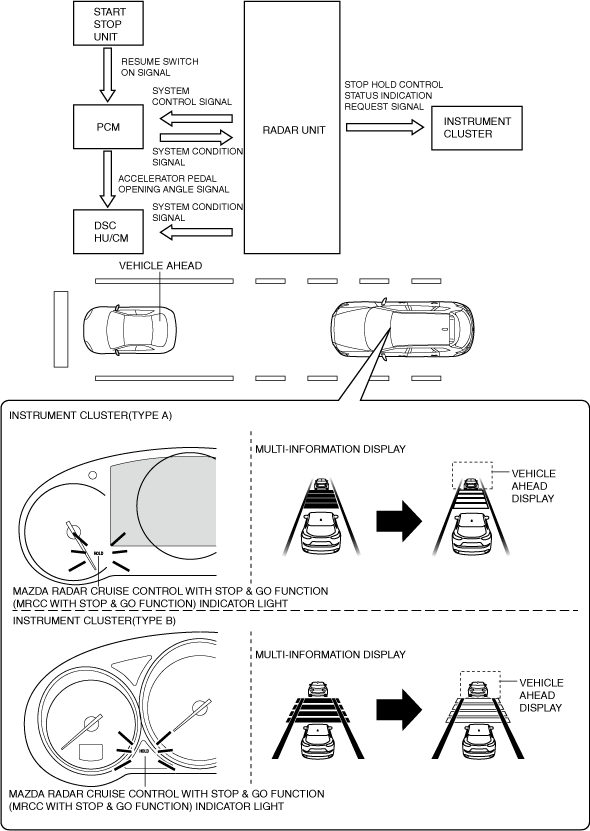
1. When the radar unit detects the target information while the vehicle is traveling in constant speed control mode, it switches the mode to headway control mode.
2. The radar unit calculates the target acceleration speed based on the following, and sends the target acceleration speed signal to the PCM and DSC HU/CM. Additionally, it sends the system status display request signal to the instrument cluster.
-
― Distance between vehicles set by driver
― Target information (position of vehicle ahead, distance between vehicles, relative vehicle speed)
― Detecting vehicle speed
3. The PCM performs engine control to maintain distance between vehicles based on the signal from the radar unit.
4. The DSC HU/CM controls braking to maintain distance between vehicles based on the signal from the radar unit.
5. The instrument cluster displays the vehicle ahead screen based on the signal from the radar unit.
-
Note
-
• In the following cases, the system transitions from headway control mode to constant speed mode.
-
― Vehicle ahead accelerates over set vehicle speed of detecting vehicle
― Vehicle ahead or detecting vehicle switches driving lanes, and vehicle ahead of detecting vehicle no longer exists
-
Stop hold control
-
1. If the vehicle ahead stops during headway control mode, the radar unit sends a system control signal to the PCM and DSC HU/CM so that the vehicle stops at the previously set distance-between-vehicles.
2. The PCM performs engine control and stops the vehicle based on the system control signal from the radar unit.
3. The DSC HU/CM performs brake control, stops the vehicle, and maintains a stopped condition based on the system control signal from the radar unit.
4. The radar unit sends the stop hold control status indication request signal to the instrument cluster after the vehicle was stopped.
5. The instrument cluster displays the stop hold control indication in the multi-information display and turns the Mazda Radar Cruise Control with Stop & Go function (MRCC with Stop & Go function) indicator light on based on the stop hold control status indication request signal from the radar unit.
6. After the radar unit recognizes that the vehicle ahead has accelerated forward during stop hold control, the PCM and DSC HU/CM cancels stop hold control when it receives the following signals.
-
― Accelerator pedal opening angle signal (accelerator pedal depressed) from PCM
― RESUME switch ON signal (RESUME switch pressed) from start stop unit
-
Note
-
• After the vehicle ahead accelerates forward and a certain period of time has elapsed, the vehicle ahead indication in the multi-information display flashes to promote the driver to accelerate the vehicle.
• When 10 min or more have elapsed since stop hold control was operated, the electric parking brake automatically operates and the Mazda Radar Cruise Control with Stop & Go function (MRCC with Stop & Go function) goes on stand-by.
7. The radar unit sends the system control signal to the PCM and DSC HU/CM and resumes headway control mode/constant speed control mode.
Steering assist function
-
1. The radar unit sends target information to the forward sensing camera (FSC).
2. The forward sensing camera (FSC) detects driving lane information.
3. The forward sensing camera (FSC) calculates the target steering angle based on the following and it sends a target steering angle signal to the electric power steering (EPS) control module.
-
― Target information (position, speed of vehicle ahead)
― Vehicle speed, acceleration speed, steering angle, yaw rate
― Driving lane information
4. The forward sensing camera (FSC) sends a system status indication request signal to the instrument cluster and the active driving display.
5. The EPS control module keeps the vehicle in the driving lane or controls the steering wheel so that it tracks the trajectory of the vehicle ahead based on the target steering angle signal from the forward sensing camera (FSC).
6. The instrument cluster displays the system status on the multi-information display based on the system status indication request signal from the forward sensing camera (FSC).
7. The active driving display displays the system status based on the system status indication request signal from the forward sensing camera (FSC).
Hands off warning function
-
1. When the EPS control module detects the driver release the hands from the steering wheel, it sends the hands off judgement signal to the forward sensing camera (FSC).
2. When the forward sensing camera (FSC) receive the hands off signal from the EPS control module, it sends the hands off judgement signal to the instrument cluster and the active driving display.
3. The instrument cluster display the warning information on the multi-information display based on the hands off judgement signal from the forward sensing camera (FSC). When a certain period of time elapses, the notification and warning speaker (front) is activated based on the request signal from the forward sensing camera (FSC).
4. The active driving display the warning information based on the hands off judgement signal from the forward sensing camera (FSC).
Inter-vehicle distance limit warning
-
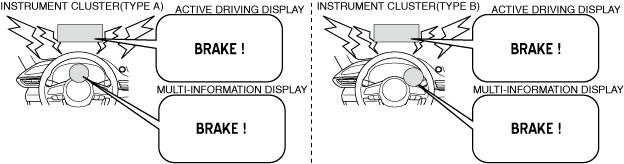
• If any of the following condition is met, the warning alarm in the instrument cluster is activated and the brake warning in the display is indicated to urge the driver to take action such as braking.
-
― Radar unit determines that crash is unavoidable even if automatic braking is performed at maximum possible deceleration rate such as vehicle ahead performs emergency braking