COMBINED SENSOR INSPECTION
id041800817200
1. Turn the ignition switch off.
2. Remove the combined sensor installation nut.
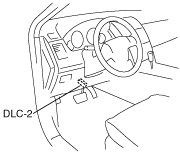
3. Connect the M-MDS to the DLC-2.
4. After the vehicle is identified, select the following items from the initialization screen of the M-MDS.
-
• When using the IDS (laptop PC)
-
1. Select “DataLogger”.
2. Select “Modules”.
3. Select “ABS”.
-
• When using the PDS (Pocket PC)
-
1. Select “Module Tests”.
2. Select “ABS”.
3. Select “DataLogger”.
5. Select the following PIDs, then inspect the lateral acceleration speed, longitudinal acceleration speed, roll rate and yaw rate.
-
― LAT_ACCL: (lateral acceleration speed)
― ACCLMTR: (longitudinal acceleration speed)
― YAW_RATE: (yaw rate)
― ROLL_RATE (roll rate)
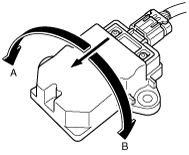
- (1) Lateral acceleration speed inspection
-
- 1) Verify the LAT_ACCL change when the combined sensor is tilted to the left and right.
-
-
• If there is any malfunction, replace the combined sensor.
-
Standard
-
When the sensor is tilted to the right (A): LAT_ACCL changes negatively.
When the sensor is tilted to the left (B): LAT_ACCL changes positively.
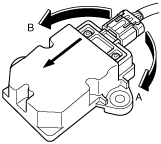
- (2) Longitudinal acceleration speed inspection
-
- 1) Verify the ACCLMTR change when the combined sensor is moved forward and backward.
-
-
• If there is any malfunction, replace the combined sensor.
-
Standard
-
When the sensor is tilted to forward (A): ACCLMTR changes negatively.
When the sensor is tilted to backward (B): ACCLMTR changes positively.
- (3) Yaw rate inspection
-
- 1) Verify the YAW_RATE change when the combined sensor is rotated to the left and right.
-
-
• If there is any malfunction, replace the combined sensor.
-
Standard
-
When the sensor is rotated to the right (A): YAW_RATE changes positively.
When the sensor is rotated to the left (B): YAW_RATE changes negatively.
- (4) Roll rate inspection
-
- 1) Verify the ROLL_RATE change when the combined sensor is tilted to the left and right.
-
-
• If there is any malfunction, replace the combined sensor
-
Standard
-
When the sensor is tilted to the right (A): ROLL_RATE changes positively
When the sensor is tilted to the left (B): ROLL_RATE changes negatively