HEADLIGHT AUTO LEVELING SYSTEM
id091800706600
Outline
• The headlight auto leveling system automatically adjusts the headlight optical axis in response to changes in load and passenger conditions to prevent blinding of oncoming vehicles from headlight glare and to assure a range of visibility.
Function
• The headlight auto leveling system is controlled by the auto leveling control module/adaptive LED headlights control module.
Optical axis adjustment function
-
• If there is a vehicle height change with the ignition switched ON (engine off or on) and the headlights turned on, the auto leveling control module/adaptive LED headlights control module automatically adjusts the headlight optical axis.
• The auto leveling control module/adaptive LED headlights control module controls the optical axis adjustment function based on the following signals.
|
Signal name
|
Sending module/part name
|
Communication method
|
|
Vehicle speed signal
|
Electronically controlled brake unit
|
CAN
|
|
Engine switch condition signal
|
Body control module (BCM)
|
|
Headlight on condition signal
|
|
Headlight leveling actuator drive amount signal
|
Light control module
|
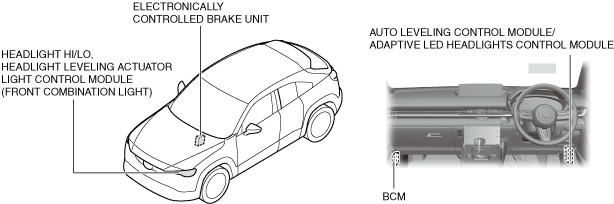
Structure/Construction
System structure
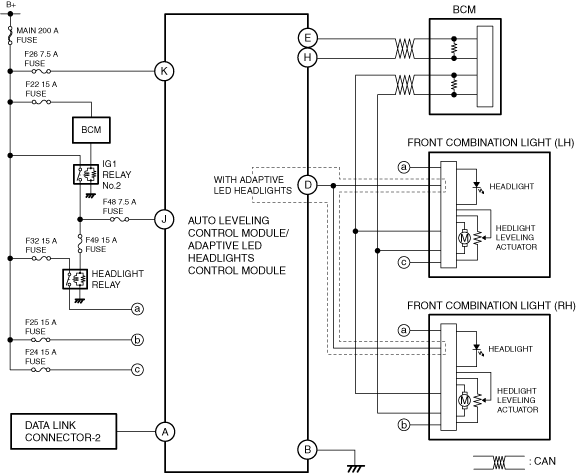
System wiring diagram
Operation
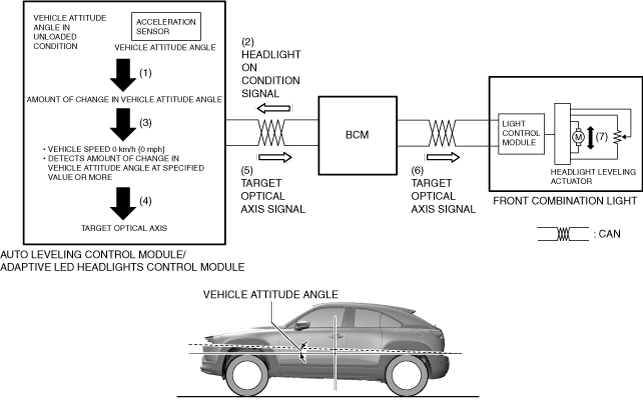
Vehicle attitude angle changes while vehicle is stopped
-
Operation conditions
-
• Operates when all of the following conditions are met:
-
― Vehicle speed is 0 km/h {0 mph} (0 km/h {0 mph} vehicle speed signal is received)
― Ignition is switched ON (engine off or on) (ignition switch position ON signal is received)
― Headlights on (headlight on condition signal reception)
― Detects amount of change in vehicle attitude angle* at specified value or more
-
Operation
-
1. The auto leveling control module/adaptive LED headlights control module calculates (1) the amount of change in the vehicle attitude angle* based on the vehicle attitude angle in the unloaded condition and the vehicle attitude angle detected by the internal acceleration sensor.
2. When the auto leveling control module/adaptive LED headlights control module detects (3) the amount of change in the vehicle attitude angle at the specified value or more at a vehicle speed of 0 km/h {0 mph} while it receives (2) a headlight on condition signal via CAN communication from the body control module (BCM), it calculates (4) the target optical axis.
3. The auto leveling control module/adaptive LED headlights control module sends (5) the calculated target optical axis signal to the body control module (BCM) via CAN communication.
4. The body control module (BCM) sends (6) the calculated target optical axis signal to the light control module via CAN communication.
5. When the light control module receives the target optical axis signal, it drives (7) the motor.
* :The amount of change in the vehicle attitude angle is the calculated value for the vehicle attitude angle information in the unloaded condition recorded by the auto leveling control module/adaptive LED headlights control module for the initial learning and the vehicle attitude angle information detected by the acceleration sensor.
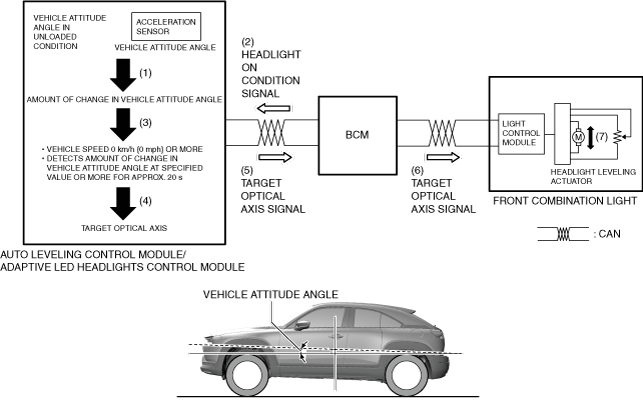
Vehicle attitude angle changes while vehicle is being driven
-
Operation conditions
-
• Operates when all of the following conditions are met:
-
― Vehicle speed is 0 km/h {0 mph} or more (vehicle speed signal of 0 km/h {0 mph} or more is received)
― Headlight on (headlight on condition signal reception)
― Detects change in vehicle attitude angle for approx. 20 s
― Detects amount of change in vehicle attitude angle* at specified value or more
-
Operation
-
1. The auto leveling control module/adaptive LED headlights control module calculates (1) the amount of change in the vehicle attitude angle* based on the vehicle attitude angle in the unloaded condition and the vehicle attitude angle detected by the internal acceleration sensor.
2. When the auto leveling control module/adaptive LED headlights control module detects (3) the amount of change in the vehicle attitude angle at the specified value or more for approx. 20 s at a vehicle speed of 0 km/h {0 mph} or more while it receives (2) a headlight on condition signal via CAN communication from the body control module (BCM), it calculates (4) the target optical axis.
3. The auto leveling control module/adaptive LED headlights control module sends (5) the calculated target optical axis signal to the body control module (BCM) via CAN communication.
4. The body control module (BCM) sends (6) the calculated target optical axis signal to the light control module via CAN communication.
5. When the light control module receives the target optical axis signal, it drives (7) the motor.
* :The amount of change in the vehicle attitude angle is the calculated value for the vehicle attitude angle information in the unloaded condition recorded by the auto leveling control module/adaptive LED headlights control module for the initial learning and the vehicle attitude angle information detected by the acceleration sensor.