ac5uun00002862
|
MULTIPLEX COMMUNICATION SYSTEM
id100000001400
Outline
ac5uun00002862
|
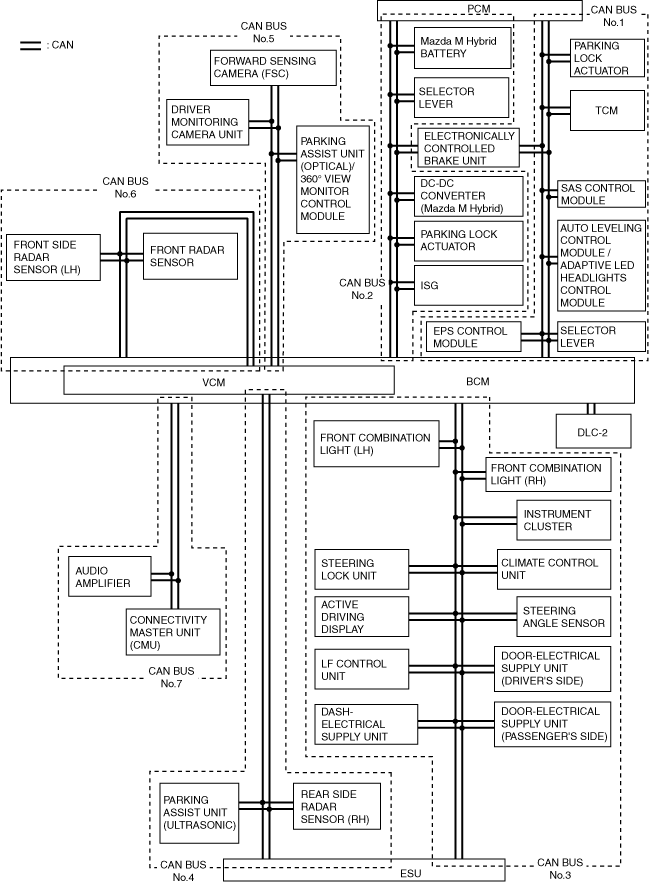
System Wiring Diagram
CAN communication
a30zzn00001531
|
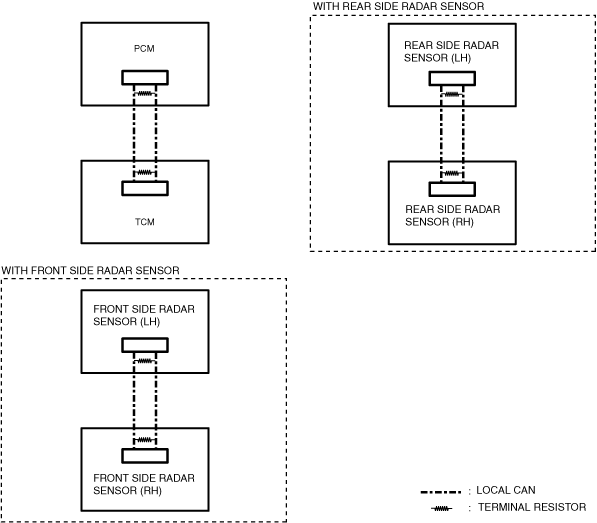
Local CAN
a30zzn00001532
|
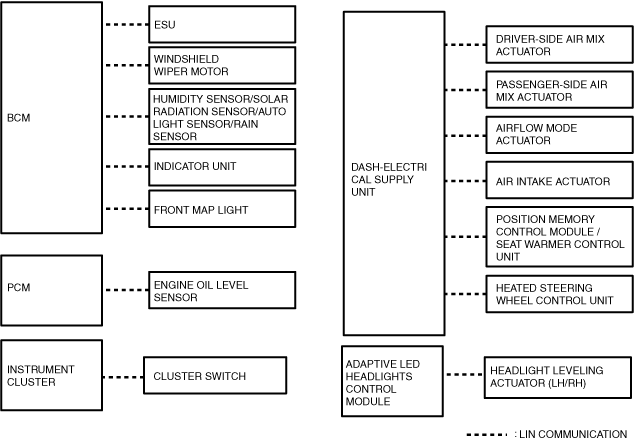
LIN communication
a30zzn00001533
|
ISO communication
a30zzn00001081
|
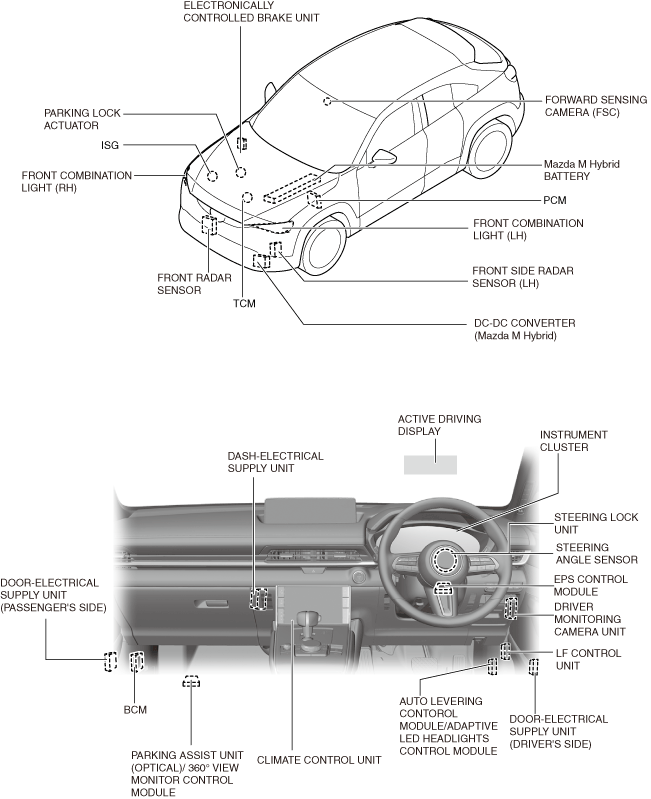
Structural View
a30zzn00001534
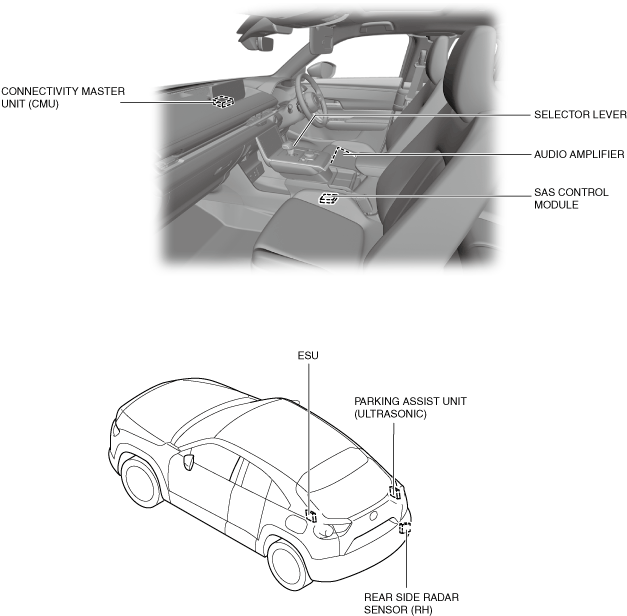
|
a30zzn00001520
|
Function
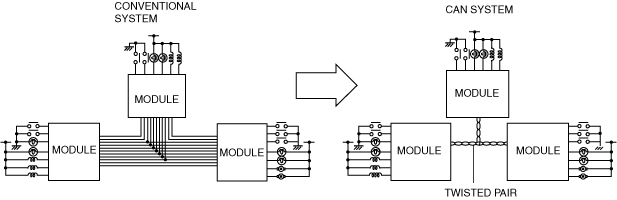
CAN (controller area network) system
Local CAN
LIN communication
ISO communication
Construction
CAN
Local CAN
LIN communication
ISO communication