― When driving in rain, mist, or snow
― Windshield washer is being used, or wipers are not used during rain
― Ice, fog, snow, frost, raindrops, dirt, or other foreign matter such as a piece of plastic is adhering to windshield
― Trucks with low loading platforms and vehicles with extremely low or high profiles
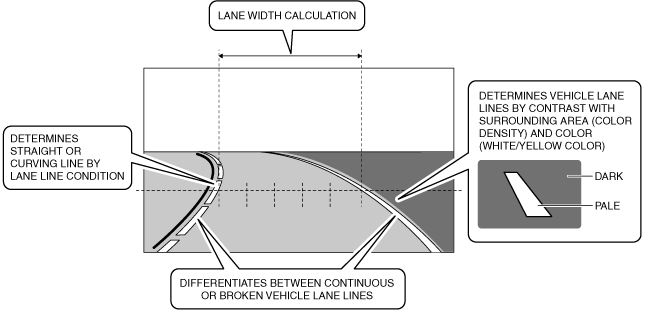
― Vehicle is driven alongside wall with no patterns on it (including fences and walls with vertical stripes)
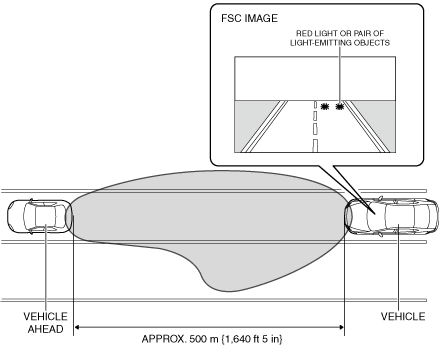
― Taillights or brake lights of vehicle ahead are turned off
― Vehicle ahead is out of headlight illumination range
― Vehicle is driven on sharp curves, or up or down steep slopes
― Vehicle is entering or exiting tunnel
― Roof rails are installed to vehicle and long object is loaded which covers FSC
― Smoke from vehicle exhaust, sand, snow, steam rising from manholes or grating, or water spray is dispersed into air
― Vehicle is driven with significantly unevenly worn tires
― Vehicle is driven on down slope or uneven road
― There are water puddles on road
― Surrounding area is dark such as at nighttime or evening, early morning, and in tunnel or indoor parking
― Headlights are not bright enough because lenses are dirty and light emission is weak or their optical axes are deviated
― Target object enters blind spot of FSC
― Target object suddenly comes out from the side or cuts right in front of vehicle
― Detecting vehicle changes lanes and approaches target object
― Vehicle is driven extremely close to target object
― Vehicle is equipped with tire chains or spare tire
― Vehicle is towing another vehicle
― Vehicle is tilted due to heavy cargo
― Vehicle is subjected to strong light (such as backlight or headlight high-beam) at front
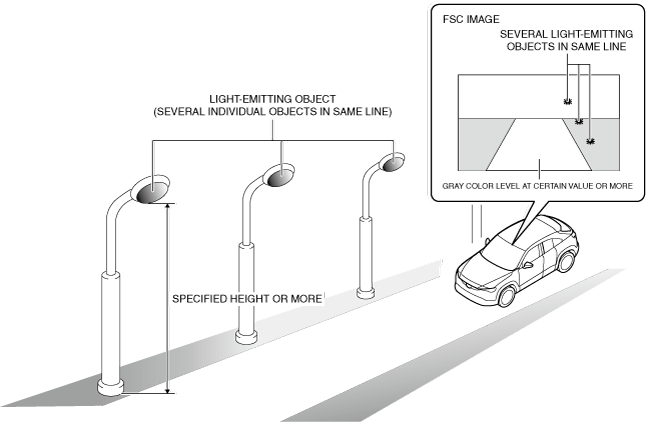
― Objects emitting strong light are in front of vehicle
― Vehicle ahead is not equipped with taillights or brake lights
― Vehicles with special shapes, such as car carriers
 atsuzn00001282
atsuzn00001282