DISTANCE RECOGNITION SUPPORT SYSTEM (DRSS)
id151000002100
Outline
• For the distance recognition support system (DRSS), the radar unit calculates the distance between the vehicle and a vehicle ahead, and displays the distance between the vehicle and a vehicle ahead in the active driving display.
-
Warning
-
• The distance recognition support system (DRSS) indicates a safe distance to maintain with the vehicle ahead as advice for safe driving. The system does not provide warning against an imminent collision with a vehicle ahead.
• The distance recognition support system (DRSS) may not operate normally under the following conditions.
-
― Visibility is reduced due to a vehicle ahead casting off water, snow, or sand.
― Heavy cargo is loaded in the luggage compartment or on the rear seat.
― Ice, snow or dirt adheres to the surface of the radiator grille or front emblem.
― Inclement weather caused by snow, rain or sand storms.
― Driving near facilities and buildings which emit strong radio waves.
― The distance between the vehicle and the vehicle ahead is extremely short.
― Another vehicle cuts into the driving lane ahead of the vehicle.
― Driving on a continuously curving road.
― Entering or exiting a curve.
― Driving on narrow lane roads due to road construction or lane closures.
― The vehicle ahead or an obstruction enters the blind spot of the radar unit.
― Driving under erratic conditions in which there is a surrounding accident or vehicle breakdown.
― Driving on roads with repeated up and down slopes (vehicle ahead cannot be detected, and it may be approached too closely).)
― Driving on poor roads or unpaved roads.
Functions
• For the distance recognition support system (DRSS), the radar unit calculates the distance between the vehicle and a vehicle ahead, and displays the distance between the vehicles in the active driving display.
Notification function
-
• The radar unit calculates the distance between the detecting vehicle and the vehicle ahead and estimates the time to a collision with the vehicle ahead based on the calculated distance and the speed of the detecting vehicle. The radar unit flashes the vehicle ahead indicator when the calculated distance declines from the previously set distance and the MRCC is off (non-operational) to notify the driver that the distance between the vehicles is close (distance closer than set distance).
Personalization features
-
• The distance recognition support system (DRSS) can be personalized as follows: For details on personalization features, refer to the [i-ACTIVSENSE PERSONALIZATION]. (See
i-ACTIVSENSE PERSONALIZATION.)
-
― The system can be set to ON (operational)/OFF (non-operational) (initial setting is ON (operational).)
― Distance for operating notification function (Initial setting is "Near")
System conditions display function
-
• The radar unit displays the system status in the active driving display.
|
Condition
|
Active driving display indication
|
Center display
|
|
Distance recognition support system (DRSS) is ON (operable)
|
Distance to vehicle ahead is long *1
|
 |
No display
|
|
Distance to vehicle ahead is less than previously set distance (notification function operates)
|
 |
No display
|
|
System is ON (operational) and no vehicle ahead is detected
|
No display
|
No display
|
|
Dirty radar sensor is detected
|
No display
|
Warning display*2
|
|
Distance recognition support system (DRSS) malfunction detected
|
No display
|
Warning display*2
|
|
Distance recognition support system (DRSS) OFF (non-operational)
|
System is OFF (non-operational)
|
No display
|
No display
|
*1 :The distance between vehicles varies depending on the vehicle speed. For details on the distance between vehicles, refer to the Distance between vehicles Chart (reference). (See
Distance between vehicles table (reference).)
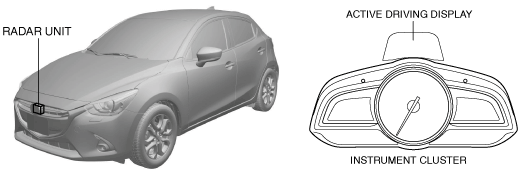
Structural View
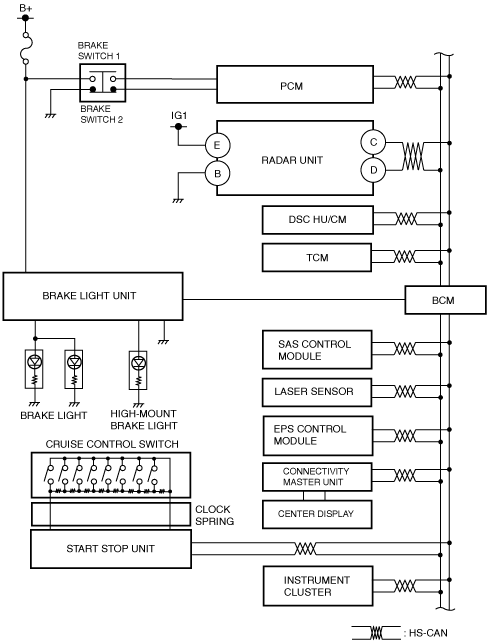
System Wiring Diagram
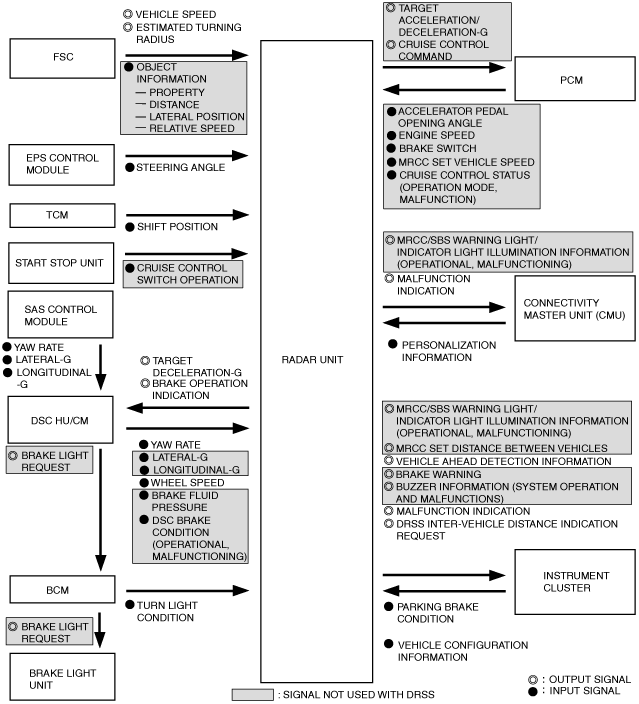
Block Diagram
Operation
Operation condition
― Distance recognition support system (DRSS) is ON (operational)
― MRCC is OFF (non-operational) (When MRCC is ON (operational), notification function does not operate because MRCC distance between vehicle control operates)
― Vehicle speed calculated by radar unit, based on wheel speed signals received via CAN communication from DSC HU/CM, is 30 km/h {40 mph} or more
― Distance to vehicle ahead is less than previously set distance
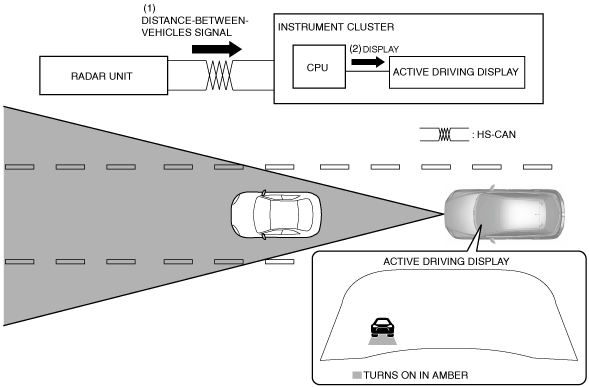
Operation
1. The radar unit calculates the distance between the vehicle ahead and the detecting vehicle, and if the calculated distance is less than the previously set distance, it sends a notification display request signal to the instrument cluster.
2. When the instrument cluster receives the notification display request signal from the radar unit, it displays the alert screen in the active driving display.
Distance between vehicles table (reference)
|
Detecting vehicle speed (km/h {mph})
|
Distance between vehicles (m {ft}
|
|
Far
|
Medium
|
Near
|
|
Approx. 30 {19}
|
Approx. 19 {62 ft 4 in}
|
Approx. 17 {55 ft 9 in}
|
Approx. 16 {52 ft 6 in}
|
|
Approx. 60 {37}
|
Approx. 34 {111 ft 7 in}
|
Approx. 26 {85 ft 4 in}
|
Approx. 22 {72 ft 2 in}
|
|
Approx. 100 {62.1}
|
Approx. 53 {173 ft 11 in}
|
Approx. 40 {131 ft 3 ft}
|
Approx. 30 {98 ft 5 in}
|