ELECTRIC POWER STEERING (EPS) CONTROL MODULE CONSTRUCTION AND OPERATION
id061300247100
Construction
• The EPS control module is integrated with the steering column.
• The module calculates the proper assist current based on the signal from the torque sensor installed on the steering column, and the vehicle speed signals from the PCM using CAN communication, and then outputs the control current to the EPS motor.
Function table
|
Control items
|
Function
|
|
Motor current control
|
• Calculates the proper assist current based on the steering force, and the vehicle and engine speeds, and outputs a target current to the EPS motor.
|
|
On-board diagnostic function
|
• Important parts of the system control have an on-board diagnostic function. In case a malfunction occurs, the EPS warning light illuminates to inform the driver and, at the same time, a DTC is stored in the EPS CM.
• When a malfunction is determined as a result of the on-board diagnosis, system control is suspended or limited to prevent any dangerous occurrence while driving.
|
|
Configuration function
|
• The configuration function according to the suspension type has been adopted to optimize the steering characteristic.
|
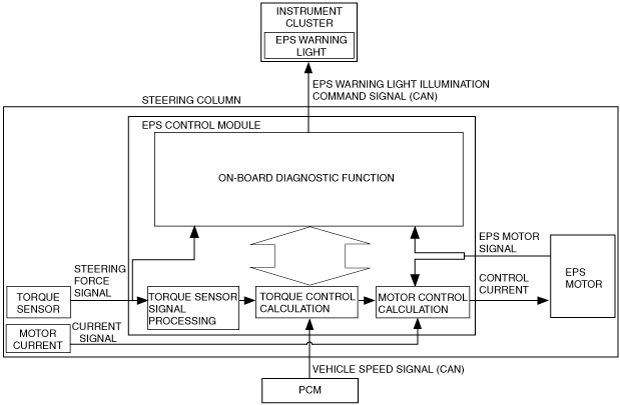
Block Diagram
Operation
Motor current control
• The optimum assist current is calculated based on the steering force signal from the torque sensor and the vehicle speed signal from the PCM, and then the control current is output to the EPS motor.
• Also, various control corrections are performed according to the vehicle driving conditions.
Assist and Stability Control
-
• The assist and stability control is calculated based on the steering force signal and the vehicle speed signal from the PCM, which then becomes the basic current for driving the EPS motor.
Yaw Damping Control
-
• The yaw damping control compensates for the influence caused by the revolution inertia of the EPS motor (insufficient torque when starting, torque continuance when stopping).
• The control current is calculated based on the steering speed signal.
Active Return Control
-
• The active return control corrects the steering wheel recovery force.
• The control current is calculated based on the steering angle signal (absolute steering angle) and the vehicle speed signal.
Torque Damping Control
1. The torque damping control reduces minute vibrations (kick-back) transmitted to the steering wheel from the road surface by correcting the control current to the EPS motor.
2. The control current is calculated based on the steering force signal and the vehicle speed signal.
System Overheating Protection Control
-
• The system overheating protection control lowers the current output to the EPS motor if the steering mechanism is turned from lock to lock continuously or the steering rack turning limit is reached repeatedly.
-
Note
-
• During system overheating protection control, the assist force will feel weaker due to a decrease in the control current. This is normal for the EPS control module to prevent the EPS motor from burning or seizure, and it does not indicate a malfunction.
• While the assist force weakens during this period of time, steering operation can be performed.
• The current output returns to normal if the temperature in the system decreases to the normal operation temperature.
-
Note
-
• The temperature decreases to the normal operation temperature within 2 min unless a steering operation is performed, and the system returns to normal control conditions. If a steering operation is performed, the time required to return to normal control conditions is extended.