am2zzn00001585
|
PARKING SENSOR SYSTEM OPERATION
id092200036000
am2zzn00001585
|
Obstruction Detection Function Operation
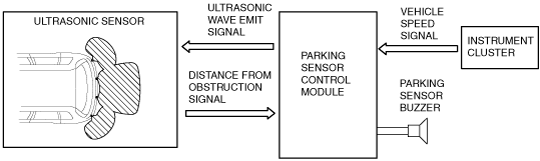
1. The ultrasonic sensor emits ultrasonic waves which an obstruction will reflect.
2. The reflected wave from the obstruction is received by the ultrasonic sensor and sent to the parking sensor control module.
3. When the microcomputer in the parking sensor control module receives the reflected signal, it calculates the detected distance to the obstruction.
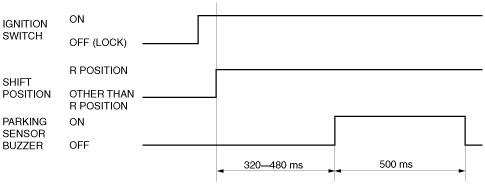
4. The microcomputer in the parking sensor control module operates the ultrasonic sensor based on the distance between the parking sensor and the obstruction, the shift position, and the vehicle speed signals.
am2zzn00001587
|
|
Vehicle condition
|
Ultrasonic sensor
|
||
|
Shift position
|
Vehicle speed
|
Corner
|
Back
|
|
Except R position
|
10—15 km/h {6.3—9.3 mph} or less
|
—
|
—
|
|
10—15 km/h {6.3—9.3 mph} or more
|
—
|
—
|
|
|
R position
|
10—15 km/h {6.3—9.3 mph} or less
|
×
|
×
|
|
10—15 km/h {6.3—9.3 mph} or more
|
—
|
×
|
|
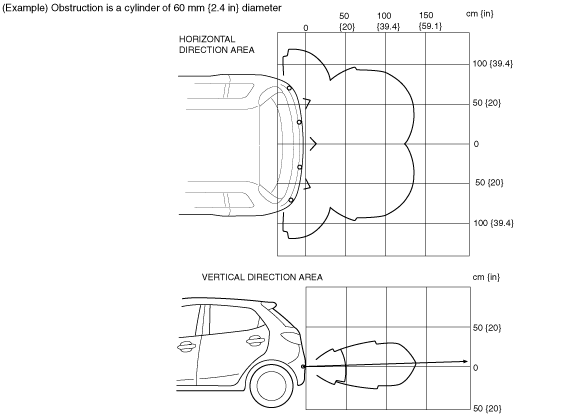
am2zzn00001588
|
|
Ultrasonic sensor
|
Zone
|
Distance from obstruction
|
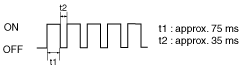
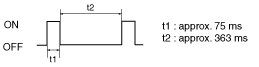
Wave pattern
|
|
Corner sensor / back sensor
|
Maximum short distance
|
Approx. 0—30 cm {0—11 in}
|
 |
|
Short distance
|
Approx. 30—31 cm {11.9—12.2 in}
|
 |
|
|
Intermediate distance
|
Approx. 32—50 cm {13—19 in}
|
 |
|
|
Long distance
|
Approx. 51—100 cm {21.0—39.3 in}
|
 |
|
|
Maximum long distance
|
Approx. 101—150 cm {39.8—59.0 in}
|
 |