 |
am3zzn00003088
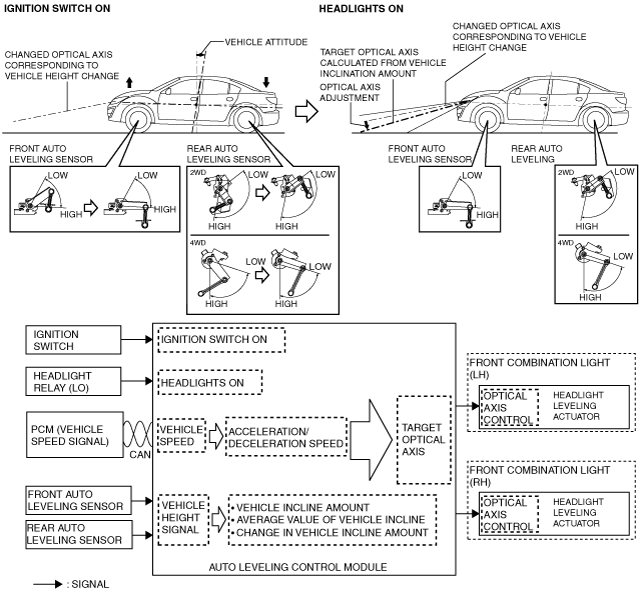
HEADLIGHT AUTO LEVELING SYSTEM OPERATION
id091800104200
am3zzn00003088
|
Headlights switched from off to on while vehicle is stopped
Operation conditions
Operation
1. If the auto leveling control module detects a headlight on signal from the headlight relay (LO), it calculates the target headlight optical axis based on the amount of vehicle inclination calculated in the 1 s period directly prior to detecting the headlight on signal.
2. The auto leveling control module outputs the target headlight optical axis signal to the headlight leveling actuator.
3. The headlight leveling actuator calculates the amount of motor drive based on the target headlight optical axis signal from the auto leveling control module and drives the motor until the headlights reach the target headlight optical axis level.
After headlights are switched from off to on while vehicle is stopped, and vehicle height changes (rear passengers, load changes)
Operation conditions
Operation
1. The auto leveling control module monitors the amount of vehicle inclination for a 3 s period from the point that the amount of vehicle inclination change, resulting from rear passenger or load changes, exceeds the threshold value.
2. If the amount of vehicle inclination change during the 3 s period does not exceed the threshold value, the headlight optical axis is calculated based on the average amount of vehicle inclination in the final 1 s period.
3. The auto leveling control module outputs the target headlight optical axis signal to the headlight leveling actuator.
4. The headlight leveling actuator calculates the amount of motor drive based on the target headlight optical axis signal from the auto leveling control module and drives the motor until the headlights reach the target headlight optical axis level.
Headlights switched from off to on while vehicle in transit
Operation conditions
Operation
1. The auto leveling control module records the average amount of vehicle inclination calculated at the point in time when the vehicle first begins to travel from a stopped condition and in the 1 s period after the vehicle is stopped.
2. If the auto leveling control module detects a headlight on signal from the headlight relay (LO) while the vehicle is traveling, it calculates the target headlight optical axis based on the average amount of vehicle inclination which was previously recorded.
3. The auto leveling control module outputs the target headlight optical axis signal to the headlight leveling actuator.
4. The headlight leveling actuator calculates the amount of motor drive based on the target headlight optical axis signal from the auto leveling control module and drives the motor until the headlights reach the target headlight optical axis level.