HEADLIGHT AUTO LEVELING SYSTEM
id091800010900
Outline
• The headlight auto leveling system automatically adjusts the discharge headlight optical axes up or down, which change depending on the vehicle cargo and passenger load. This is to prevent blinding of oncoming vehicles from headlight glare and to assure a range of visibility.
• The headlight auto leveling system is controlled by the AFS (adaptive front lighting system) control module. (with AFS)
• The headlight auto leveling system is controlled by the auto leveling control module. (without AFS)
Function
• The AFS control module constantly calculates the amount of vehicle inclination based on the vehicle height signal from the auto leveling sensor when the ignition is switched ON. (with AFS)
• The auto leveling control module constantly calculates the amount of vehicle inclination based on the vehicle height signal from the auto leveling sensor when the ignition is switched ON. (without AFS)
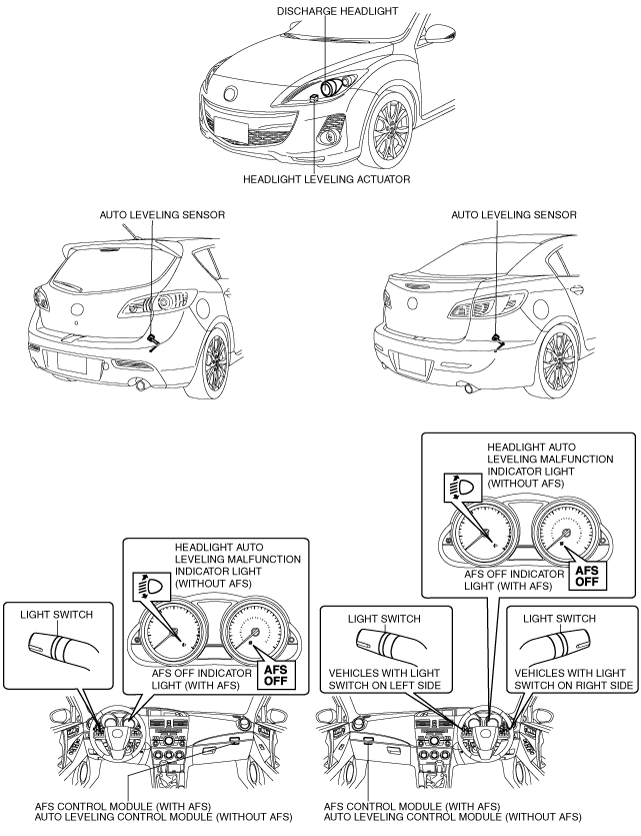
• If there is a malfunction in the headlight auto leveling system, the AFS OFF indicator light flashes to make notification of the malfunction in the system. (with AFS)
• If there is a malfunction in the headlight auto leveling system, the headlight auto leveling malfunction indicator light flashes to make notification of the malfunction in the system. (without AFS)
Structural View
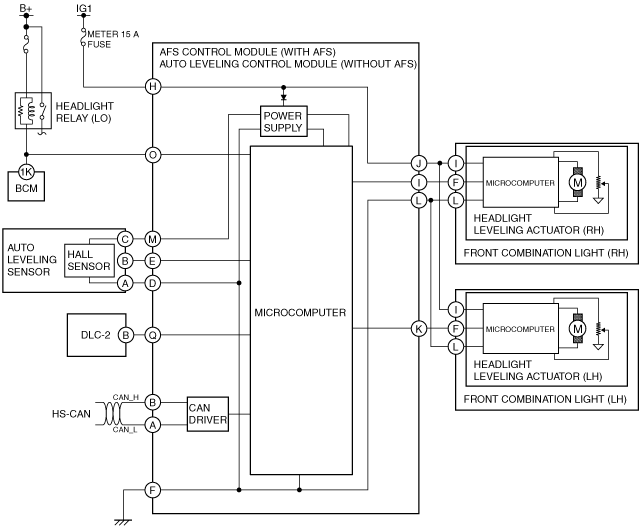
System Wiring Diagram
Operation
Headlights switched from off to on while vehicle is stopped
-
• Operation conditions
-
― Switch the ignition ON
― Vehicle speed 0 km/h {0 mph}
― At point in time headlights are switched from off to on
-
• Operation
With AFS
-
1. If the AFS control module detects a headlight on signal from the headlight relay (LO), it calculates the target headlight optical axis based on the amount of vehicle inclination calculated in the 1 s period directly prior to detecting the headlight on signal.
2. The AFS control module outputs the target headlight optical axis signal to the headlight leveling actuator.
3. The headlight leveling actuator calculates the amount of motor drive based on the target headlight optical axis signal from the AFS control module, and drives the motor until the headlights reach the target headlight optical axis level.
Without AFS
-
1. If the auto leveling control module detects a headlight on signal from the headlight relay (LO), it calculates the target headlight optical axis based on the amount of vehicle inclination calculated in the 1 s period directly prior to detecting the headlight on signal.
2. The auto leveling control module outputs the target headlight optical axis signal to the headlight leveling actuator.
3. The headlight leveling actuator calculates the amount of motor drive based on the target headlight optical axis signal from the auto leveling control module, and drives the motor until the headlights reach the target headlight optical axis level.
After headlights are switched from off to on while vehicle is stopped, and vehicle height changes (rear passengers, load changes)
-
• Operation conditions
-
― Switch the ignition ON
― Vehicle speed 0 km/h {0 mph}
― Headlights on
― At point where amount of vehicle inclination change exceeds threshold value
-
• Operation
With AFS
-
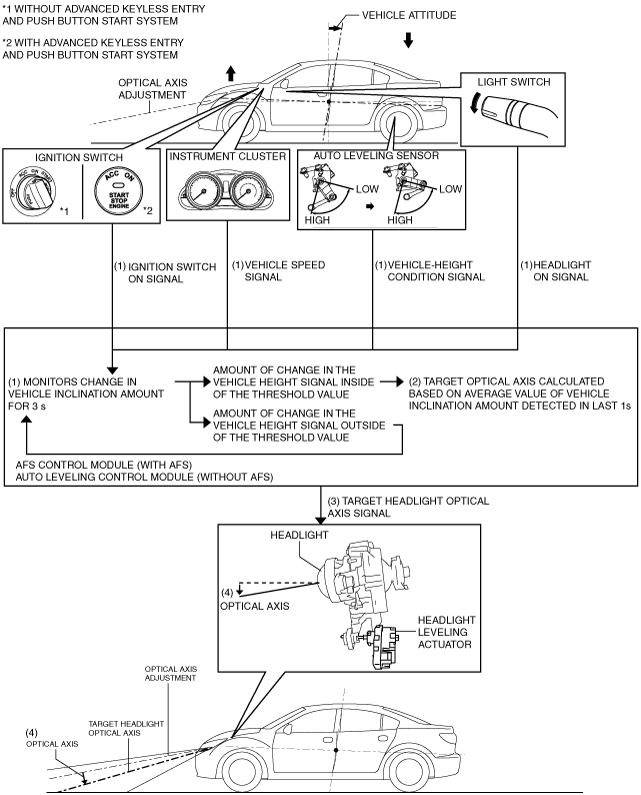
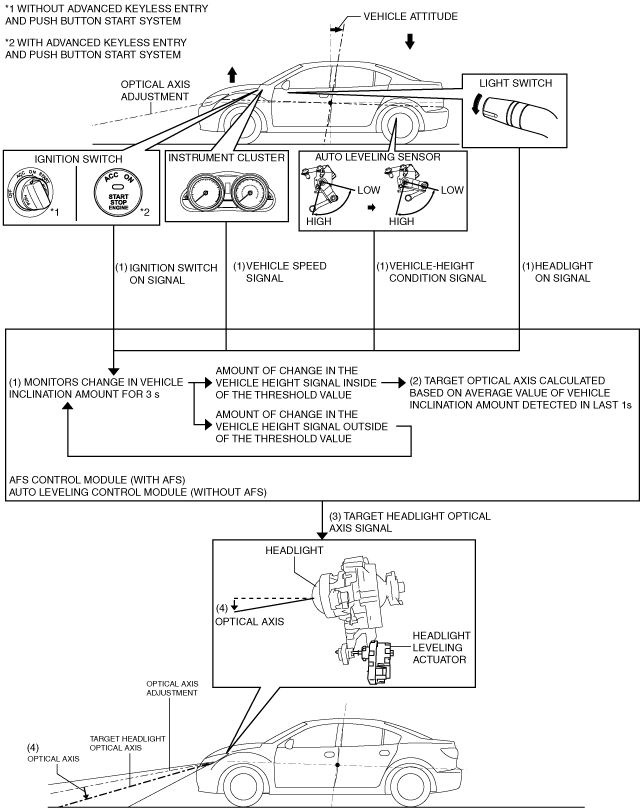
1. The AFS control module monitors the amount of vehicle inclination for a 3 s period from the point that the amount of vehicle inclination change (resulting from rear passenger or load changes) exceeds the threshold value.
2. If the amount of vehicle inclination change during the 3 s period does not exceed the threshold value, the headlight optical axis is calculated based on the average amount of vehicle inclination in the final 1 s period.
3. The AFS control module outputs the target headlight optical axis signal to the headlight leveling actuator.
4. The headlight leveling actuator calculates the amount of motor drive based on the target headlight optical axis signal from the AFS control module, and drives the motor until the headlights reach the target headlight optical axis level.
Without AFS
-
1. The auto leveling control module monitors the amount of vehicle inclination for a 3 s period from the point that the amount of vehicle inclination change (resulting from rear passenger or load changes) exceeds the threshold value.
2. If the amount of vehicle inclination change during the 3 s period does not exceed the threshold value, the headlight optical axis is calculated based on the average amount of vehicle inclination in the final 1 s period.
3. The auto leveling control module outputs the target headlight optical axis signal to the headlight leveling actuator.
4. The headlight leveling actuator calculates the amount of motor drive based on the target headlight optical axis signal from the auto leveling control module, and drives the motor until the headlights reach the target headlight optical axis level.
Headlights switched from off to on while vehicle in transit
-
• Operation conditions
-
― Switch the ignition ON
― Vehicle speed 30 km/h {19 mph} or more and during travel at constant vehicle speed
― At point in time headlights switched from off to on
-
• Operation
With AFS
-
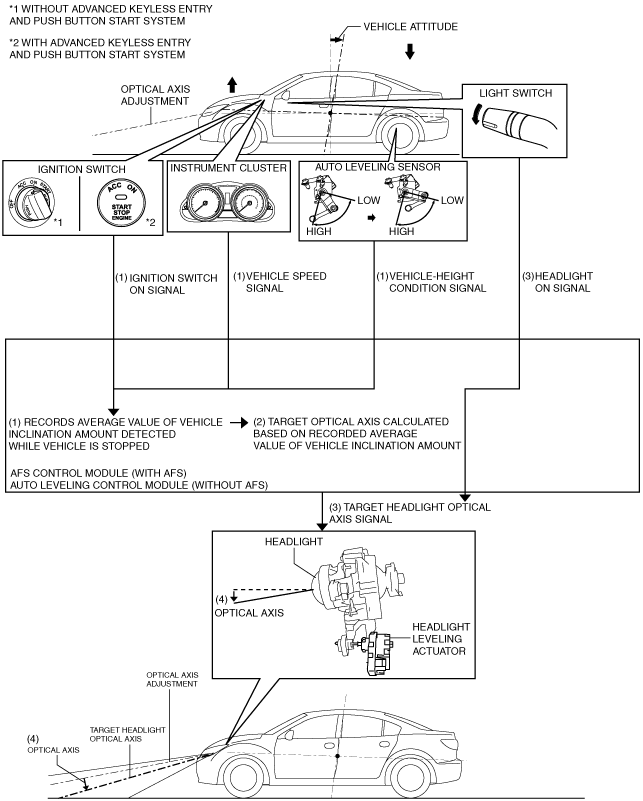
1. The AFS control module records the average amount of vehicle inclination calculated at the point in time when the vehicle first begins to travel from a stopped condition, and in the 1 s period after the vehicle is stopped.
2. The AFS control module calculates the target optical axis based on the amount of vehicle inclination previously recorded.
3. When the AFS control module detects a headlight ON signal from the headlight relay (LO) while the vehicle is traveling, it outputs a target optical axis to the headlight leveling actuator.
4. The headlight leveling actuator calculates the amount of motor drive based on the target headlight optical axis signal from the AFS control module, and drives the motor until the headlights reach the target headlight optical axis level.
Without AFS
-
1. The auto leveling control module records the average amount of vehicle inclination calculated at the point in time when the vehicle first begins to travel from a stopped condition, and in the 1 s period after the vehicle is stopped.
2. The auto leveling control module calculates the target optical axis based on the amount of vehicle inclination previously recorded.
3. When the auto leveling control module detects a headlight ON signal from the headlight relay (LO) while the vehicle is traveling, it outputs a target optical axis to the headlight leveling actuator.
4. The headlight leveling actuator calculates the amount of motor drive based on the target headlight optical axis signal from the auto leveling control module, and drives the motor until the headlights reach the target headlight optical axis level.
Amount of vehicle inclination changes as result of vehicle going from stopped condition to being driven
-
• Operation conditions
-
― Switch the ignition ON
― Vehicle speed 30 km/h {19 mph} or more and during travel at constant vehicle speed
― At point in time headlights switched from off to on
― At point where amount of vehicle inclination change exceeds threshold value
-
• Operation
With AFS
-
1. The AFS control module monitors the amount of vehicle inclination for a 3 s period from the point that the amount of vehicle inclination change (resulting from the vehicle going from a stopped condition to one of being driven) exceeds the threshold value.
2. If the amount of vehicle inclination change during the 3 s period does not exceed the threshold value, the headlight optical axis is calculated based on the average amount of vehicle inclination in the final 1 s period.
3. The AFS control module outputs the target headlight optical axis signal to the headlight leveling actuator.
4. The headlight leveling actuator calculates the amount of motor drive based on the target headlight optical axis signal from the AFS control module, and drives the motor until the headlights reach the target headlight optical axis level.
Without AFS
-
1. The auto leveling control module monitors the amount of vehicle inclination for a 3 s period from the point that the amount of vehicle inclination change (resulting from the vehicle going from a stopped condition to one of being driven) exceeds the threshold value.
2. If the amount of vehicle inclination change during the 3 s period does not exceed the threshold value, the headlight optical axis is calculated based on the average amount of vehicle inclination in the final 1 s period.
3. The auto leveling control module outputs the target headlight optical axis signal to the headlight leveling actuator.
4. The headlight leveling actuator calculates the amount of motor drive based on the target headlight optical axis signal from the auto leveling control module, and drives the motor until the headlights reach the target headlight optical axis level.
Amount of vehicle inclination changes during vehicle travel
-
Note
-
• Control of the headlight optical axis during vehicle travel is performed one time during one period of travel.
-
• Operation conditions
-
― Switch the ignition ON
― Vehicle speed 30 km/h {19 mph} or more and during travel at constant vehicle speed
― At point in time headlights switched from off to on
― At point where amount of vehicle inclination change exceeds threshold value
-
• Operation
With AFS
-
1. The AFS control module monitors the amount of vehicle inclination for a 3 s period from the point that the amount of vehicle inclination change (resulting from the change in the amount of vehicle inclination during vehicle travel) exceeds the threshold value.
2. If the amount of vehicle inclination change during the 3 s period does not exceed the threshold value, the headlight optical axis is calculated based on the average amount of vehicle inclination in the final 1 s period.
3. The AFS control module outputs the target headlight optical axis signal to the headlight leveling actuator.
4. The headlight leveling actuator calculates the amount of motor drive based on the target headlight optical axis signal from the AFS control module, and drives the motor until the headlights reach the target headlight optical axis level.
Without AFS
-
1. The auto leveling control module monitors the amount of vehicle inclination for a 3 s period from the point that the amount of vehicle inclination change (resulting from the change in the amount of vehicle inclination during vehicle travel) exceeds the threshold value.
2. If the amount of vehicle inclination change during the 3 s period does not exceed the threshold value, the headlight optical axis is calculated based on the average amount of vehicle inclination in the final 1 s period.
3. The auto leveling control module outputs the target headlight optical axis signal to the headlight leveling actuator.
4. The headlight leveling actuator calculates the amount of motor drive based on the target headlight optical axis signal from the auto leveling control module, and drives the motor until the headlights reach the target headlight optical axis level.