VARIABLE VALVE TIMING CONTROL OPERATION [L3]
id0140a61713a7
• The PCM divides the oil control valve drive range into four modes according to engine operation conditions and calculates the OCV drive.
Cleaning Mode
Mode execution condition
-
• Deceleration with CTP
Purpose
-
• Cleaning mode is to remove foreign material in the OCV oil passages.
Operation
-
• The target current in the cleaning mode is fixed at 100 mA or 1,000 mA. A current of 100 mA and 1,000 mA flows to the OCV alternately at certain intervals. When 100 mA current flows, the OCV opens the oil passage for the advance chamber and hydraulic pressure from the oil pump is introduced to the retard chamber. When 1,000 mA current flows, the OCV opens the hydraulic passage for the retard chamber and hydraulic pressure is introduced from the oil pump to the advance chamber. After repeating this operation one time, foreign material penetrating the OCV is removed and the cleaning mode is completed.
Maximum Cam Retard Mode
Mode execution condition
-
• When any of the following conditions are met:
-
- Cranking
-
- Idling
-
- During torque reduction control execution
-
- Engine coolant temperature is less than 20 °C {68 °F}
-
- Engine speed is less than 875 rpm.
Purpose
-
• Maximum cam retard mode stabilizes engine speed by maximally retarding the valve timing during torque reduction execution while idling.
Operation
-
• When the target current in the maximum cam retard mode is fixed at 100 mA. When 100 mA current flows, oil pressure from the oil pump is introduced to the retard chamber. Because of this, the variable valve timing actuator is fixed at the maximum retard position (minimum overlap).
Feedback Hold Mode
Mode execution condition
-
• Target valve timing and actual valve timing are almost equal.
Purpose
-
• The feedback hold mode holds the valve timing by returning the OCV spool valve to the neutral position when target valve timing suitable for the engine operation conditions is obtained.
Feedback Mode
Mode execution condition
-
• Except during cleaning, maximum cam retard, or feedback hold modes
Purpose
-
• Feedback mode obtains valve timing suitable for engine operation conditions by performing the feedback operation so that the present OCV drive current is set closer to the target current determined by the PCM according to engine operation conditions.
Advance spark speed correction
• If there is a large difference between the target valve timing and the actual valve timing, the target current correction is applied so that it is set closer to the target valve timing more quickly to raise the advance spark speed by advancing the spool valve initialization operation.
• The variable valve timing actuator advance spark speed increases as the hydraulic passage in the OCV widens and decreases as it narrows.
Valve timing determination
• The PCM controls current to the OCV to obtain optimum valve timing suitable for the engine operation conditions (target valve timing).
• The PCM compares target valve timing with actual valve timing, and feeds back the result to change valve timing smoothly.
Target valve timing
-
• Target valve timing is determined according to engine speed and charging efficiency.
Actual valve timing
-
• Actual valve timing indicates present valve timing. Actual valve timing is determined by subtracting the maximum cam retard learning value from the value detected by the camshaft position sensor and crankshaft position sensor.
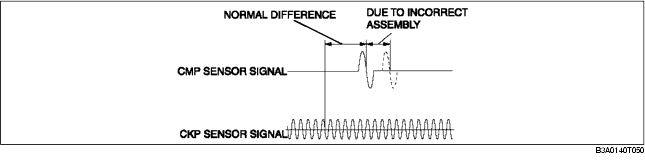
Cam maximum retard learning value
-
• Though the intake camshaft valve timing (including maximum retard position) is detected based on the CMP and CKP signals, variation in signals from the assembly of each sensor occurs. As a result, the PCM stores the difference in the rise of the CMP and CKP signals to prevent detection of variations in the valve timing.