Cause (Condition)
Driving condition
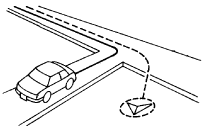
• At a Y-shaped fork in the road where the roads separate gradually, the vehicle locator mark may be displayed on the wrong road.
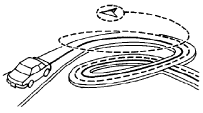
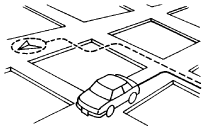
• If the vehicle makes continuous, large turns, for example on a loop structure, the vehicle locator mark may go off the road altogether.
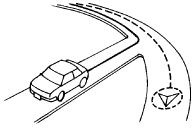
• After driving for a long distance in a straight line or through gentle curves, if the vehicle turns a corner, the vehicle locator mark may be displayed on the wrong road.
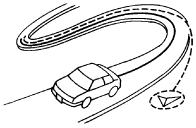
• On a zigzag road, the vehicle locator mark may go off the road.
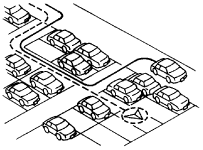
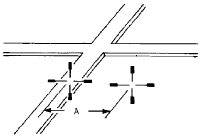
• If the roads form a grid, the vehicle locator mark may go off the road.
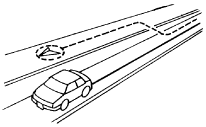
• If there are parallel roads nearby, for example motorways and service roads, the vehicle locator mark may go off the road.
• If driving in an area where roads are not available on the map, the vehicle locator mark may deviate from the correct position when the vehicle returns to the road. Also, when you turn or go back and forth repeatedly, the vehicle locator mark may not line up correctly with the road.
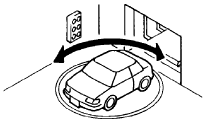
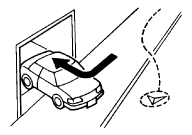
• If the vehicle rotates on a turntable, the car-navigation system may have difficulty returning the vehicle locator mark to the road correctly.

• On slippery roads; for example, snow and ice-covered roads, wet roads, gravel roads, the vehicle locator mark may deviate from the correct road.
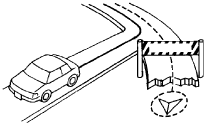
• If the vehicle turns on an embankment; for example, at a parking garage entrance, on slope or banked roads, the vehicle locator mark may go off the road.

• If driving on a new road not registered in the map data, the car-navigation system may incorrectly match the vehicle’s position with a nearby road and when the vehicle returns to a road available in the map data, the vehicle locator mark may be off the correct road.
• If the road registered in the map data and the actual road configuration differ, the vehicle locator mark may be off the correct road.

• For regions where there is no detailed map, the car-navigation system compares regions where there are detailed maps and configuration is sometimes not expressed correctly. Also, because few minor roads are registered, when the vehicle drives on a road not available in the map data, the vehicle locator mark may go off the correct road.
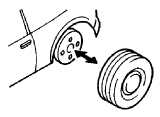
• If the vehicle has tire chains, the distance travelled is not correctly detected and the vehicle locator mark may go off the correct road.

• If the vehicle moves erratically, for example spinning wheels, the vehicle locator mark may go off the correct road.
• In locations such as cities where there are a lot of roads, if the setting accuracy is poor when the vehicle’s position is moved, the car-navigation system may be unable to find the correct road and accuracy may drop.
• If the vehicle’s position is moved and the vehicle direction does not match, the accuracy may drop afterwards.