Misfire Monitoring
Misfire MonitoringGeneral Description
The method of engine misfire detection is based on evaluating the engine speed fluctuations.
In order to detect misfiring at any cylinder, the torque of each cylinder is evaluated by metering the time between two ignition events, which is a measure for the mean value of the speed of this angular segment. This means, a change of the engine torque results in a change of the engine speed.
Additionally the influence of the load torque will be determined.
When the mean engine speed has been measured, influences caused by different road surfaces have to be eliminated (e.g. pavement, pot holes etc.).
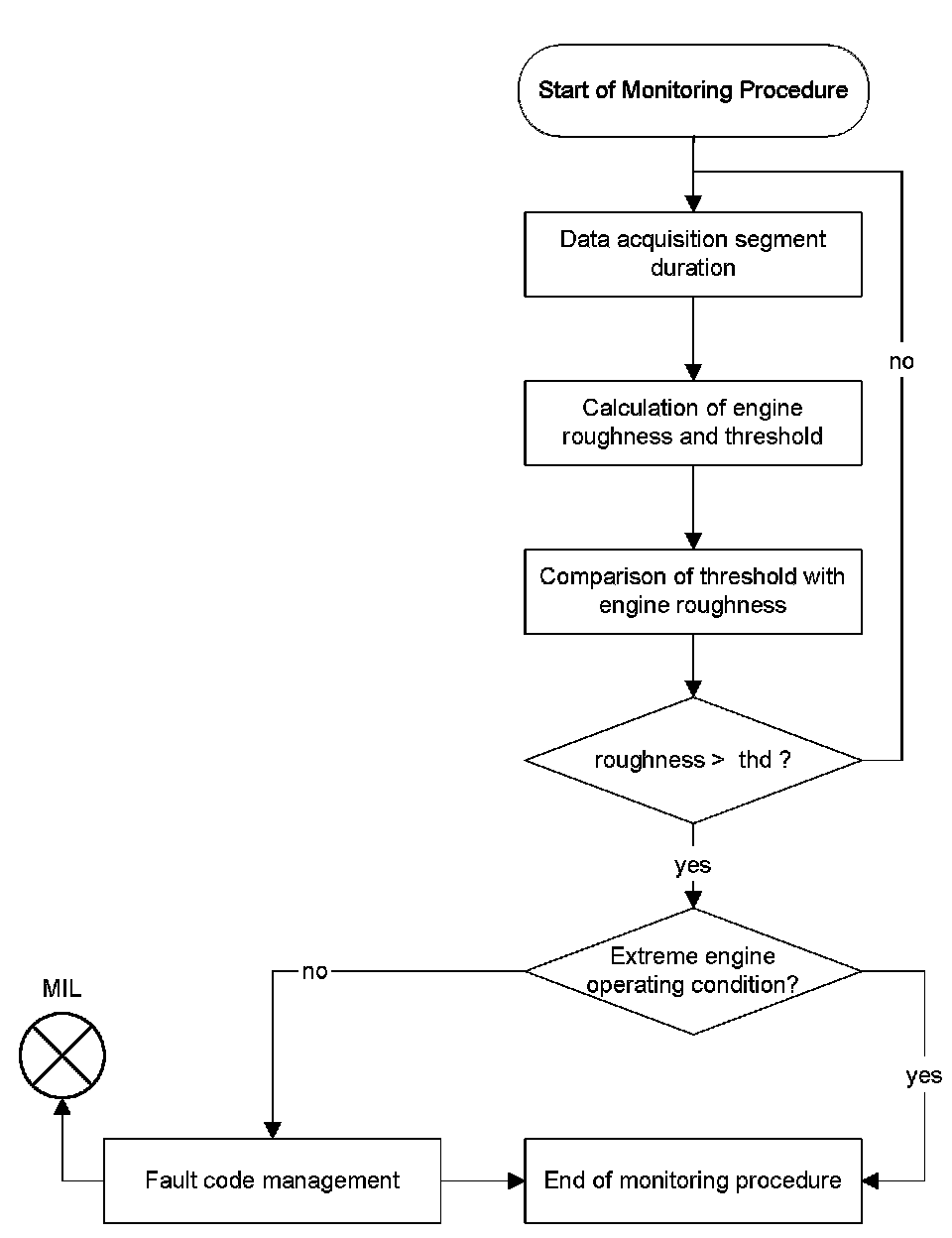
This method consists of the following main parts:
- Correction of normal changes of engine rpm and engine load
- Data acquisition, adaptation of sensor wheel is included
- Calculation of engine roughness
- Comparison with a threshold depending on operating point
- Fault processing, counting procedure of single or multiple misfire events
Monitoring function description
Data acquisition
The duration of the crankshaft segments is measured continuously for every combustion cycle and stored in a memory.
Sensor wheel adaptation
During fuel cut off within defined engine speed ranges the adaptation of the sensor wheel tolerances is carried out. With progressing adaptation the sensitivity of the misfire detection is increasing. The adaptation values are stored in a non-volatile memory and taken into consideration for the calculation of the engine roughness.
Misfire detection
The following operating steps are performed for each measured segment, corrected by the sensor wheel adaptation.
Calculation of the engine roughness
The engine roughness is derived from the differences of the segment's duration. Different statistical methods are used to distinguish between normal changes of the segment duration and the changes due to misfiring.
Detecting of multiple misfiring
If several cylinders are misfiring (e.g. alternating one combustion/one misfire event), the calculated engine roughness values may be so low, that the threshold is not exceeded during misfiring and therefore, misfiring would not be detected.
Calculation of the engine roughness threshold value
The engine roughness threshold value consists of the base value, which is determined by a load/speed dependent map. During warm-up, a coolant-temperature-dependent correction value is added. In case of multiple misfiring the threshold is reduced by an adjustable factor. Without sufficient sensor wheel adaptation the engine roughness threshold is limited to a speed dependent minimum value. A change of the threshold towards a smaller value is limited by a variation of filter value (low pass filter).
Determination of misfiring
Random misfire
Misfire detection is performed by comparing the engine roughness threshold value with the engine roughness value. If the engine roughness value is greater than the roughness threshold value a single misfire is detected. With this misfire determination it is possible to identify misfiring cylinders individually.
Random misfire without valid adaptation
To eliminate the influence of the missing flywheel adaptation each engine roughness value is compared with that one on the same flywheel segment on the intermittent revolution. Therefore single misfire events are detected reliable without determination of the flywheel tolerances.
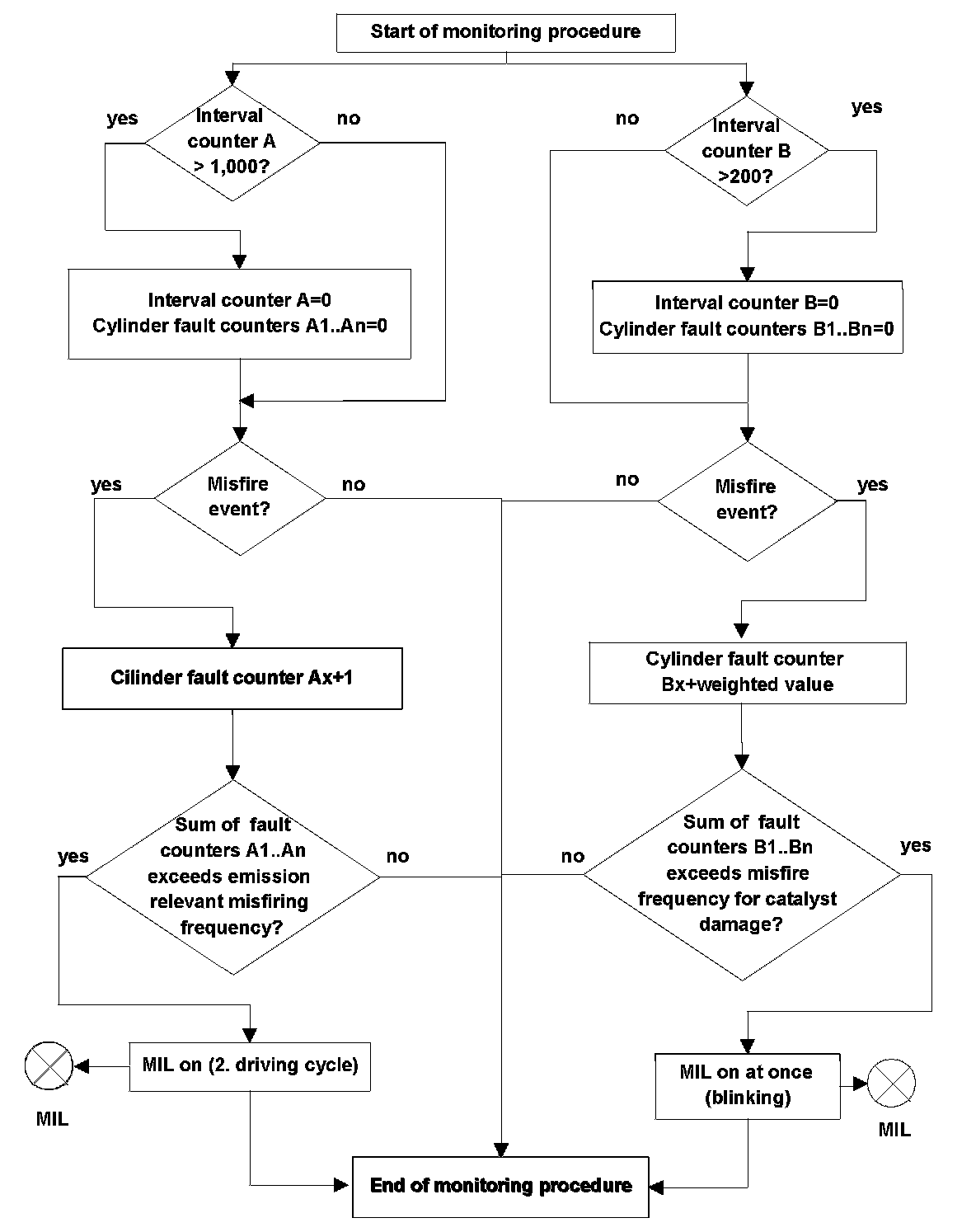
Statistics, Fault processing
Within an interval of 1,000 crankshaft revolutions, the detected number of misfiring events is totaled for each cylinder. If the sum of cylinder fault counters exceeds a predetermined value, a fault code for emission relevant misfiring is preliminary stored after completion of the first interval after engine has been started or the forth interval during a driving cycle where misfire has been detected.
In the case of misfire detection for one cylinder, the fault is determined by a cylinder selective fault code otherwise the fault code for multiple misfire will be stored additionally.
Within an interval of 200 crankshaft revolutions, the detected numbers of misfire events is weighted and totaled for each cylinder.
The weighting factor is determined by a load/speed dependent map.
If the sum of cylinder fault counters exceeds a predetermined value, the fault code for indicating catalyst damage relevant misfiring is stored and the MIL is illuminated with "on/off"-sequence once per second (blinking).
In case of misfire detection for one cylinder the fault is determined by a cylinder selective fault code otherwise the fault code for multiple misfiring will be stored additionally.
If catalyst damaging misfire does not occur any longer during the first driving cycle, the MIL will return to the previous status of activation (e.g. MIL off) and will remain illuminated continuously during all subsequent driving cycles if catalyst related misfire is detected again. However all misfire events where the catalyst can be damaged are indicated by a blinking MIL. If catalyst damage is not detected under similar conditions in the subsequent driving cycle the temporary fault code will be deleted.
In the case of catalyst related misfire, the Lambda closed loop system is switched to open-loop condition according to the basic air/fuel ratio calculation (Lambda=1).
All misfire counters are reset after each interval.
Chart and Flow Chart(s)
Paths for misfire and catalyst damaging misfire rate