Principles of Operation
Communications Network
Principles of Operation
NOTE: The Smart Junction Box (SJB) is also known as the Generic Electronic Module (GEM).
Vehicle communication utilizes both the medium and high speed Controller Area Network (CAN) communications. CAN is a method for transferring data among distributed electronic modules via a serial data bus.
The vehicle is equipped with 3 module communication networks:
- ISO 9141
- Medium Speed Controller Area Network (MS-CAN)
- High Speed Controller Area Network (HS-CAN)
ISO 9141 Communications Network
The ISO 9141 communications network is a single wire network. The ISO 9141 communications network does not permit intermodule communication. When the scan tool communicates to modules on the ISO 9141 communication network, the scan tool must request all information; the modules cannot initiate communications.
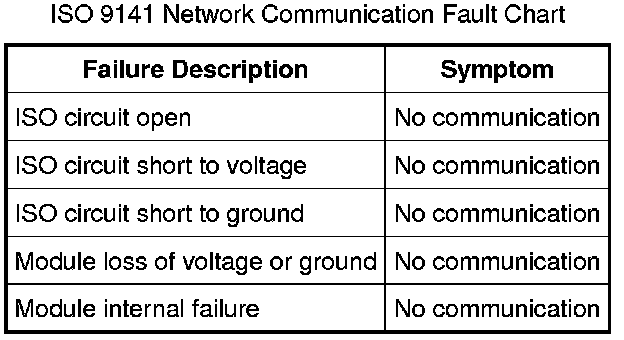
The following fault chart describes the specific ISO 9141 network failures and their resulting symptom:
ISO 9141 Network Communication Fault Chart:
High Speed Controller Area Network (HS-CAN) and Medium Speed Controller Area Network (MS-CAN)
The CAN uses an unshielded twisted pair cable of data (+) and data (-) circuits. The data (+) and the data (-) circuits are each regulated to approximately 2.5 volts during neutral or rested network traffic. As bus messages are sent on the data (+) circuit, voltage is increased by approximately 1.0 volt. Inversely, the data (-) circuit is reduced by approximately 1.0 volt when a bus message is sent. Multiple bus messages can be sent over the network CAN circuits allowing multiple modules to communicate with each other.
The HS-CAN is a high speed communication network used for the Instrument Cluster (IC), PCM, the 4X4 control module, the Restraints Control Module (RCM), the Occupant Classification System Module (OCSM) and the Smart Junction Box (SJB). The MS-CAN is a medium speed communication network used for the Satellite Digital Audio Receiver System (SDARS) module and audio unit (ACM) on satellite radio equipped vehicles.
In the event that 1 of the 2 network circuits (CAN + or CAN -) becomes open to a module on the network, unreliable network communication to all modules on the network may result. The module to which the network circuit is open may repeatedly send network messages indicating there has been partial data received. This type of message is referred to as a Negative-Acknowledge (NACK) message. Repeated NACK messages may "load" the network with too much activity causing intermittent no communication to other network modules and/or the scan tool.
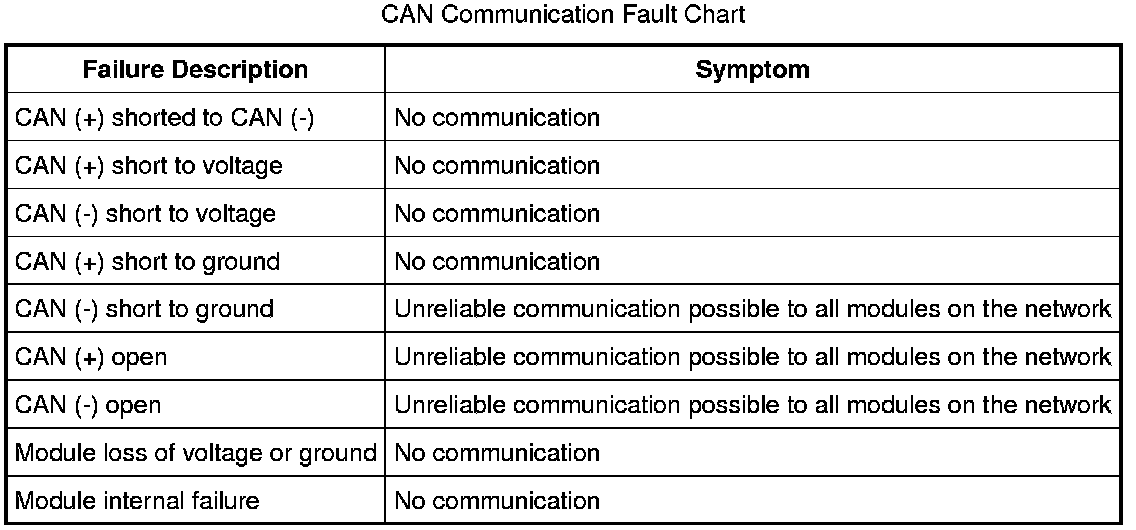
The following fault chart describes the specific CAN failures and their resulting symptom:
CAN Communication Fault Chart:
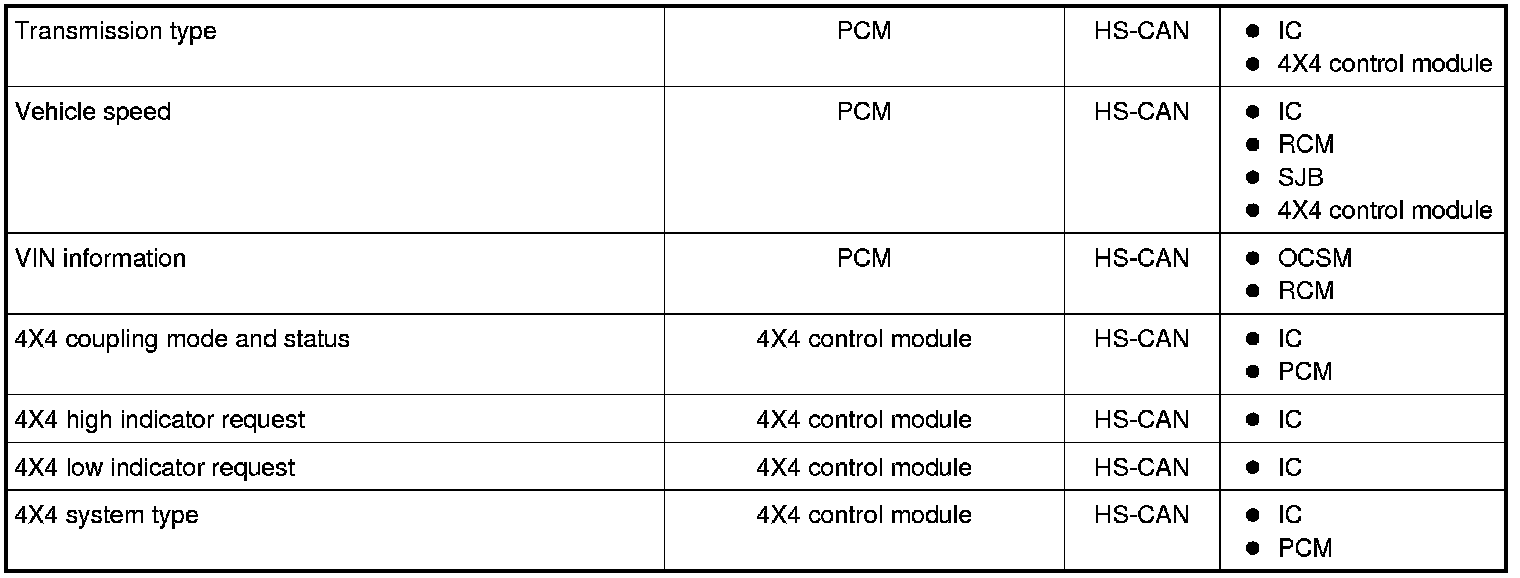
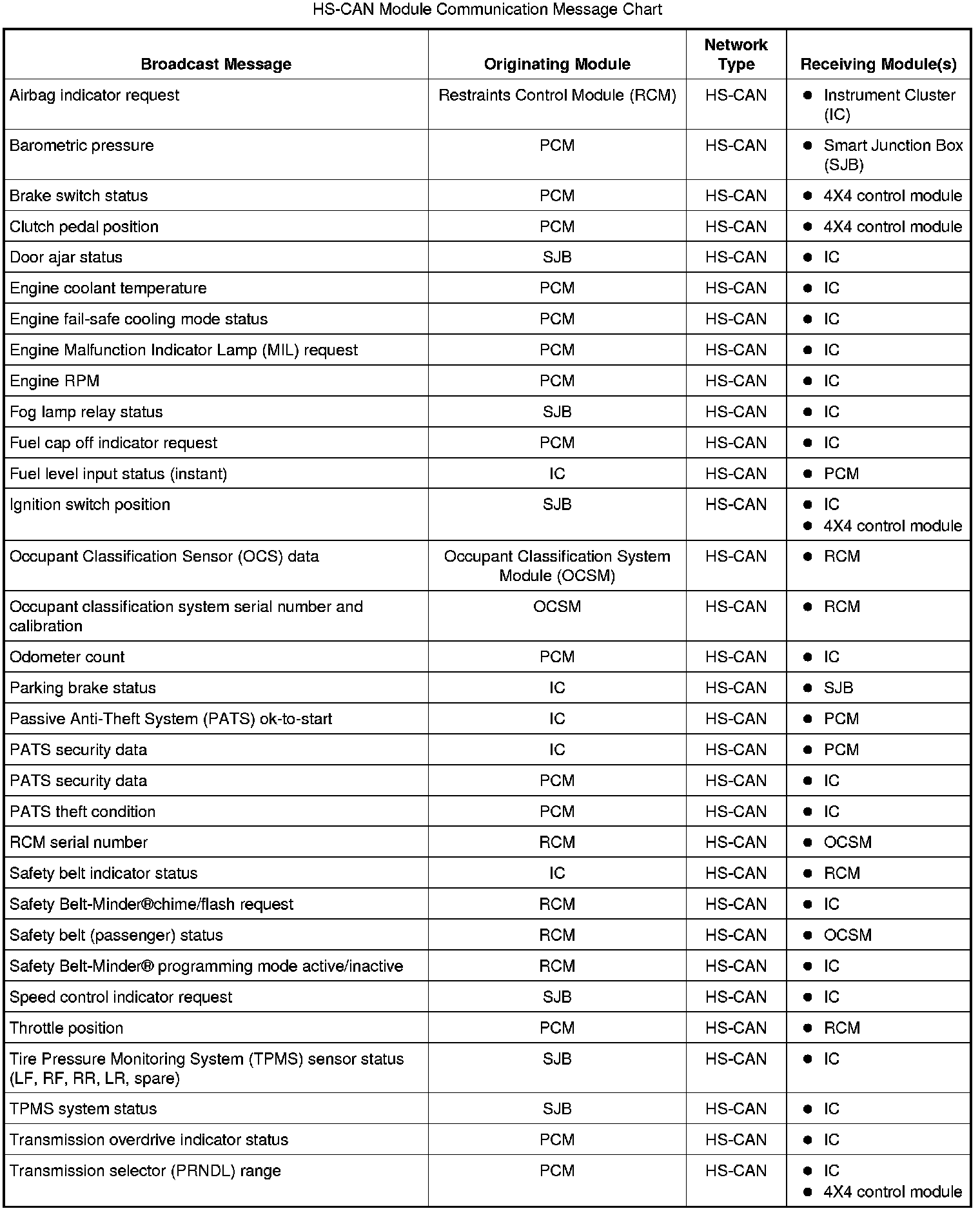
The following chart describes the specific HS-CAN messages broadcast by each module, and the module(s) that receive the message:
HS-CAN Module Communication Message Chart (Part 1):
HS-CAN Module Communication Message Chart (Part 2):